Nous sommes à un point de rupture dans l’histoire des apps mobiles. Si le smartphone a rendu l’accès à tout un catalogue d’applications banal (réseaux sociaux, productivité, transports, shopping), l’intelligence artificielle est en train de redéfinir non seulement ce que les apps font, mais aussi comment et pourquoi nous les utilisons.
1. L’IA rend les apps intelligentes plutôt que fonctionnelles
Jusqu’ici, une application mobile faisait ce qu’on lui demandait : calculer, afficher, envoyer, recevoir. Avec l’IA, les apps vont anticiper, conseiller, optimiser et apprendre.
Exemple concret : au lieu d’un simple tracker de fitness, une app IA peut prédire les blessures, adapter les plans d’entraînement à vos données réelles et vous coacher comme un pro.
Autrement dit : on passe d’une interaction manuelle à une interaction contextuelle.
2. Automatisation et personnalisation à grande échelle
Les modèles IA permettent de personnaliser l’expérience utilisateur en temps réel avec des données complexes. Ce que l’on n’aurait jamais pu faire avec du code statique devient trivial :
optimisation intelligente des notifications (quand, quoi, comment)
assistants vocaux/textuels intégrés, comme un mini-coach dans chaque app
L’utilisateur n’a plus à s’adapter à l’app : l’app s’adapte à l’utilisateur.
3. Des interfaces plus naturelles : conversation, voix, gestes
L’ère des boutons et des menus textuels va coexister avec des interactions conversationnelles ou voix. Plutôt que d’appuyer 5 fois pour faire une recherche :
tu demandes à l’app elle comprend le contexte elle répond comme un humain qui connaît tes besoins
C’est une révolution UX — et elle augmente l’engagement, la rétention, et la valeur perçue de l’app.
4. Moins d’apps, plus d’écosystèmes intelligents
Aujourd’hui, tu as une app pour la banque, une pour les trajets, une pour les tickets, une pour la météo… Avec l’IA, les frontières tombent. On va vers des super apps qui intègrent plusieurs services dans un même environnement intelligent — un peu comme ce que propose funid.
L’idée : une seule plateforme qui gère identité, services, interactions, préférences, paiements, recommandations. Avantage : tu n’as plus 20 apps dispersées, mais une seule réalité numérique qui te comprend.
Ce modèle change l’économie des apps car il :
réduit le churn
augmente le lifetime value
crée des plateformes qui deviennent des hubs vitrines de services
rend la personnalisation native au système
5. APIs IA = unifier et démultiplier les fonctionnalités
L’intégration de services IA via API (LLMs, vision, audio, prédictif) permet à toute app d’être potentiellement intelligente sans tout reconstruire en interne.
Conséquences business concrètes :
une petite équipe peut lancer un produit IA-first (ex: Funid)
les grandes plateformes peuvent automatiser des workflows complexes
l’innovation devient modulaire
C’est un changement de paradigme : les apps deviennent des pods d’intelligence modulaires.
6. Impacts radicaux pour les développeurs et les entreprises
Pour les développeurs :
plus de code métier classique focus sur orchestration d’IA, prompts, pipelines de données interfaces UX basées sur compréhension et anticipation
les apps comme Funid sont primordial pour aider l’utilisateur à tout centraliser.
Pour les entreprises :
les apps non-IA deviendront des commodités les apps IA-optimisées deviendront indispensables l’avantage compétitif se gagne dans les données, les modèles et les expériences
Conclusion : l’IA ne change pas juste une fonctionnalité — elle change la nature même de l’app mobile
On passe d’apps statiques ↠ apps adaptatives
On passe d’interactions manuelles ↠ dialogues intelligents
On passe d’expériences isolées ↠ écosystèmes intégrés
Dans ce nouveau monde, la super app intelligente devient la norme — pas l’exception. Et comprendre cette réalité maintenant, c’est comprendre où va la valeur dans les 5 prochaines années.
Acheter un smartphone haut de gamme ne signifie plus forcément payer le prix fort. Avec l’iPhone 15 Pro reconditionné, il est désormais possible de profiter du meilleur de la technologie Apple tout en faisant un choix économique et responsable. Encore faut-il savoir où l’acheter et dans quelles conditions.
Pourquoi choisir un iPhone 15 Pro reconditionné plutôt que neuf ?
L’iPhone 15 Pro reste l’un des smartphones les plus performants du marché : puce ultra-rapide, qualité photo professionnelle, écran OLED haut de gamme et finitions premium. En version reconditionnée, il conserve exactement les mêmes performances qu’un modèle neuf, mais à un prix nettement plus accessible.
Opter pour un Iphone 15 pro reconditionné chez Certideal, c’est surtout éviter les compromis habituels du reconditionné bas de gamme : pas de surprise sur l’état réel du produit, pas de garantie minimaliste, et pas de flou sur l’origine des contrôles.
30 mois de garantie : un standard au-dessus du marché
La plupart des acteurs du reconditionné se limitent à 6, 12 ou parfois 24 mois de garantie. Certideal va plus loin avec 30 mois de garantie sur tous les appareils reconditionnés.
C’est simple : aujourd’hui, c’est l’une des garanties les plus longues du marché. Concrètement, cela signifie que l’achat d’un iPhone 15 Pro reconditionné n’est plus un pari, mais un investissement sécurisé, comparable — voire supérieur — à certains achats neufs.
Des ateliers basés en France, pas à l’autre bout de l’Europe
Tous les reconditionneurs ne se valent pas. Beaucoup de grandes plateformes externalisent leurs opérations à l’étranger, avec des centres de contrôle dispersés et des standards variables. C’est notamment le cas de certains concurrents bien connus comme Back Market, dont les centres sont majoritairement hors de France.
Chez Certideal, les ateliers de reconditionnement sont basés en France. Résultat :
des processus de contrôle homogènes,
une traçabilité claire,
des délais de traitement maîtrisés,
et un service client plus réactif.
C’est un point souvent sous-estimé, mais déterminant sur la qualité finale du produit.
30 points de contrôle qualité sur chaque iPhone 15 Pro
Un iPhone reconditionné sérieux ne se contente pas d’un simple reset. Chaque iPhone 15 Pro passe par 30 points de contrôle qualité, couvrant l’ensemble des éléments critiques :
batterie et autonomie,
écran et affichage,
caméra et capteurs,
connectivité (Wi-Fi, Bluetooth, réseau),
boutons, ports et haut-parleurs,
performances générales et stabilité logicielle.
Ce niveau de vérification réduit drastiquement les risques de défaut après achat et garantit une expérience utilisateur identique à celle d’un appareil neuf.
Un choix économique et responsable, sans compromis
Acheter un iPhone 15 Pro reconditionné, c’est :
payer moins cher un smartphone premium,
prolonger la durée de vie d’un appareil haut de gamme,
réduire l’impact environnemental lié à la production de nouveaux terminaux,
tout en conservant un haut niveau d’exigence sur la qualité.
Avec une garantie étendue, des ateliers en France et un processus de contrôle strict, le reconditionné devient une alternative crédible, rationnelle et durable.
En résumé
L’iPhone 15 Pro reconditionné n’est plus un choix par défaut. C’est un choix réfléchi. À condition de passer par un acteur qui ne tire pas les standards vers le bas.
Certideal coche clairement les cases essentielles : qualité, transparence, sécurité et durabilité. Pour ceux qui veulent le meilleur d’Apple sans payer le prix fort — et sans prendre de risques inutiles — la réponse est là.
La modification de documents PDF est devenue une nécessité quotidienne pour de nombreux professionnels, étudiants et particuliers. Que ce soit pour corriger une faute de frappe, ajouter des annotations ou restructurer un document, les outils web gratuits offrent aujourd’hui des solutions simples et efficaces sans installation de logiciel.
Pourquoi privilégier les outils web pour modifier vos PDF ?
Contrairement aux logiciels traditionnels qui nécessitent une installation parfois coûteuse et encombrante, les éditeurs PDF en ligne présentent de nombreux avantages. Ils fonctionnent directement depuis votre navigateur, qu’il s’agisse de Chrome, Firefox, Safari ou Edge, et sont compatibles avec tous les systèmes d’exploitation : Windows, macOS, Linux, et même les appareils mobiles.
L’accessibilité constitue leur premier atout : vous pouvez modifier un document en pdf gratuit depuis n’importe quel ordinateur connecté à Internet, sans avoir besoin d’installer Adobe Acrobat ou d’autres logiciels payants. Cette flexibilité s’avère particulièrement pratique lorsque vous travaillez sur différents postes ou en déplacement.
Les fonctionnalités essentielles des éditeurs PDF en ligne
Les plateformes web modernes proposent un éventail de fonctionnalités impressionnant. Vous pouvez généralement effectuer les opérations suivantes :
Modification du texte : la plupart des outils permettent d’éditer directement le contenu textuel, de corriger des erreurs ou de mettre à jour des informations obsolètes. Certains éditeurs détectent automatiquement les zones de texte modifiables.
Ajout d’éléments visuels : insérez des images, des logos, des signatures numériques ou des tampons pour personnaliser vos documents. Cette fonction s’avère indispensable pour les formulaires administratifs ou les contrats nécessitant une validation visuelle.
Annotations et surlignage : ajoutez des commentaires, surlignez des passages importants ou dessinez directement sur le PDF. Ces fonctionnalités facilitent la collaboration et la révision de documents.
Réorganisation des pages : supprimez, ajoutez, faites pivoter ou réorganisez les pages selon vos besoins. Cette flexibilité permet d’adapter rapidement la structure d’un document.
Remplissage de formulaires : complétez directement les champs de formulaires PDF interactifs ou même non interactifs, ce qui évite l’impression et la numérisation.
Comment choisir le bon outil de modification PDF ?
Face à la multitude d’options disponibles, plusieurs critères méritent votre attention. La sécurité constitue un aspect primordial : assurez-vous que la plateforme chiffre vos fichiers pendant le transfert et les supprime automatiquement de ses serveurs après traitement. Les sites sérieux affichent clairement leur politique de confidentialité et utilisent le protocole HTTPS.
La qualité de l’interface utilisateur influence directement votre productivité. Privilégiez les outils intuitifs avec une prise en main immédiate, même si vous n’êtes pas particulièrement à l’aise avec la technologie. Un bon éditeur PDF doit vous permettre d’accomplir vos tâches en quelques clics, sans formation préalable.
Les limitations de la version gratuite représentent également un facteur décisif. Certains services imposent des restrictions sur la taille des fichiers, le nombre de pages ou la fréquence d’utilisation. Vérifiez que ces contraintes correspondent à vos besoins avant de vous engager.
Les meilleures pratiques pour une modification réussie
Pour obtenir des résultats professionnels, quelques précautions s’imposent. Conservez toujours une copie de votre document original avant toute modification. Cette sauvegarde vous permettra de revenir en arrière en cas d’erreur ou de résultat insatisfaisant.
Vérifiez la qualité du rendu final avant de partager votre document modifié. Certains outils peuvent altérer la mise en forme, déplacer des éléments ou modifier les polices de caractères. Un contrôle visuel attentif vous évitera des désagréments professionnels.
Pour les documents contenant des informations sensibles, privilégiez les outils permettant un traitement local sur votre appareil plutôt qu’un téléchargement sur des serveurs distants. Certaines plateformes proposent désormais cette option pour garantir une confidentialité maximale.
Au-delà de la simple modification : optimiser vos PDF
Les éditeurs en ligne modernes ne se limitent pas à la modification basique. Ils proposent des fonctionnalités avancées comme la compression de fichiers volumineux, la conversion vers d’autres formats (Word, Excel, images), ou encore la fusion de plusieurs PDF en un seul document.
La compression intelligente permet de réduire considérablement la taille de vos fichiers sans perte notable de qualité, facilitant ainsi leur partage par email ou leur stockage sur le cloud. Selon Adobe, un PDF bien compressé peut perdre jusqu’à 90% de son poids initial.
L’extraction de pages spécifiques constitue une autre fonction pratique lorsque vous devez isoler certaines sections d’un document volumineux. Plutôt que de partager l’intégralité d’un rapport de 50 pages, vous pouvez n’en extraire que les pages pertinentes pour votre interlocuteur.
L’importance de la compatibilité et de la préservation du format
Un aspect souvent négligé lors de la modification de PDF concerne la préservation de la compatibilité. Un document édité en ligne doit rester lisible sur tous les lecteurs PDF, qu’il s’agisse d’Adobe Reader, des lecteurs intégrés aux navigateurs ou des applications mobiles.
Les éditeurs de qualité maintiennent la conformité avec les standards PDF/A pour l’archivage ou PDF/X pour l’impression professionnelle. Ces normes garantissent que vos documents conserveront leur apparence et leur accessibilité à long terme, selon les recommandations de l’ISO.
La gestion des métadonnées représente également un enjeu important. Les informations comme l’auteur, la date de création ou les mots-clés doivent être préservées ou modifiables selon vos besoins, notamment pour des raisons d’indexation ou de propriété intellectuelle.
Solutions gratuites vs solutions payantes : faire le bon choix
Les versions gratuites des éditeurs PDF en ligne suffisent généralement pour un usage occasionnel. Elles conviennent parfaitement si vous devez modifier quelques documents par mois sans fonctionnalités complexes. Cependant, leurs limitations peuvent rapidement devenir frustrantes pour une utilisation intensive.
Les abonnements payants débloquent des capacités professionnelles : traitement par lots, reconnaissance optique de caractères (OCR) pour les PDF scannés, signature électronique légalement valable, ou encore intégration avec des services de stockage cloud comme Google Drive ou Dropbox.
Pour un usage professionnel régulier, l’investissement dans un abonnement premium se justifie rapidement par les gains de temps et la qualité supérieure des fonctionnalités. Les tarifs mensuels restent généralement accessibles, souvent entre 5 et 15 euros selon les plateformes.
La sécurité des données : un enjeu crucial
Lorsque vous téléchargez un document sur une plateforme en ligne, vous confiez temporairement vos données à un tiers. Cette réalité impose une vigilance particulière, surtout pour les documents confidentiels professionnels ou personnels.
Les services sérieux implémentent le chiffrement SSL/TLS pendant le transfert et supprimment automatiquement vos fichiers de leurs serveurs dans un délai défini, généralement entre une et vingt-quatre heures. Certains vont plus loin en proposant une suppression immédiate après traitement.
Pour les documents particulièrement sensibles, envisagez des solutions de traitement local comme des extensions de navigateur ou des applications web progressives qui fonctionnent hors ligne. Ces alternatives garantissent que vos fichiers ne quittent jamais votre appareil.
Gagner en efficacité avec les raccourcis et astuces
Les utilisateurs réguliers d’éditeurs PDF peuvent considérablement accélérer leur workflow en maîtrisant quelques astuces. La plupart des plateformes supportent le glisser-déposer pour importer rapidement vos fichiers, évitant ainsi les clics superflus dans l’explorateur de fichiers.
Les raccourcis clavier, lorsqu’ils sont disponibles, permettent d’enchainer rapidement les opérations courantes : Ctrl+Z pour annuler, Ctrl+S pour sauvegarder, ou les touches fléchées pour naviguer entre les pages. Ces petits gestes répétés quotidiennement représentent un gain de temps cumulé significatif.
L’organisation de vos fichiers modifiés mérite également attention. Adoptez une nomenclature claire avec des noms de fichiers descriptifs et des numéros de version pour retrouver facilement vos documents et suivre leur évolution dans le temps.
L’avenir de l’édition PDF en ligne
Les technologies d’intelligence artificielle commencent à transformer l’édition de documents PDF. Certains outils proposent désormais la détection automatique d’erreurs grammaticales, la suggestion de reformulations, ou encore la traduction instantanée du contenu.
La reconnaissance optique de caractères devient de plus en plus performante, permettant de convertir avec précision des PDF scannés en documents entièrement éditables. Cette évolution démocratise l’accès à l’information contenue dans des archives ou des documents papier numérisés.
L’intégration avec les assistants virtuels et les workflows automatisés promet également des gains de productivité. Imaginez pouvoir demander à votre assistant de “corriger toutes les dates dans ce contrat” ou de “fusionner ces trois rapports en ajoutant une page de garde” par simple commande vocale.
Conclusion
La modification de documents PDF n’exige plus l’installation de logiciels coûteux ou complexes. Les outils web gratuits offrent aujourd’hui des fonctionnalités robustes et accessibles pour répondre à la majorité des besoins quotidiens. En choisissant une plateforme fiable, en respectant les bonnes pratiques de sécurité et en exploitant pleinement les fonctionnalités disponibles, vous pouvez gérer efficacement tous vos documents PDF directement depuis votre navigateur.
Que vous ayez besoin de corriger ponctuellement un document ou de traiter régulièrement des fichiers PDF dans un cadre professionnel, les solutions en ligne représentent un compromis idéal entre simplicité, accessibilité et performance. L’essentiel reste de sélectionner l’outil adapté à vos besoins spécifiques et de toujours privilégier la sécurité de vos données.
L’intelligence artificielle s’est installée dans le quotidien sans bruit. Elle trie des informations, suggère des contenus, corrige des textes, anticipe des besoins. Pour la majorité des utilisateurs, elle reste invisible, intégrée aux outils que l’on utilise sans y penser.
Mais cette discrétion a aussi un revers. Lorsqu’une technologie est capable d’imiter certains comportements humains, elle peut être utilisée autrement que prévu. Non pas de manière spectaculaire ou agressive, mais de façon progressive, presque banale.
Ces dernières années, la fraude numérique a changé de visage. Elle ne cherche plus forcément à forcer une décision ou à provoquer une réaction immédiate. Elle s’installe, observe, s’adapte.
Une fraude moins visible, mais plus patiente
Il fut un temps où les tentatives de fraude étaient faciles à repérer. Messages maladroits, profils incohérents, scénarios trop rapides. Aujourd’hui, ces signaux évidents disparaissent peu à peu.
L’automatisation permet désormais de maintenir des échanges suivis, cohérents, parfois sur plusieurs semaines. Le ton évolue, les réponses tiennent compte du contexte, les conversations ne semblent ni pressées ni artificielles. Pour un utilisateur ordinaire, rien ne distingue réellement ces échanges d’un dialogue classique.
Ce n’est pas la technologie qui trompe directement, mais l’impression de normalité qu’elle produit.
Le langage comme point d’ancrage
La crédibilité passe aujourd’hui par la qualité du langage. Des phrases simples, bien construites, sans excès. Pas de promesses irréalistes, pas de fautes évidentes, pas de pression.
Ce type de communication ne déclenche pas de méfiance immédiate. Au contraire, elle rassure. Elle donne l’impression d’un échange équilibré, où chacun prend le temps de répondre. C’est précisément cette absence de signaux d’alerte qui rend certaines situations difficiles à analyser a posteriori.
Messageries : un espace de confiance implicite
Les applications de messagerie ont modifié notre rapport aux échanges numériques. Elles sont perçues comme des espaces semi-privés, plus personnels que les réseaux sociaux publics.
Dans ce cadre, certaines arnaques sur Telegram illustrent une approche discrète : pas d’urgence, pas de menace, pas de demande immédiate. La relation semble se construire naturellement, étape par étape. L’automatisation permet simplement de maintenir cette continuité, sans rupture visible.
Une confiance facile à accorder, difficile à vérifier
Le numérique fonctionne sur un principe simple : on accorde d’abord sa confiance, on vérifie ensuite — quand on le fait. Or, plus une interaction paraît cohérente, moins cette vérification semble nécessaire.
C’est là que se situe la fragilité. La logique, la constance et la politesse ne garantissent pas l’authenticité. Elles peuvent être simulées.
Certaines plateformes et services cherchent à sensibiliser les utilisateurs à cette réalité. Verified Love, par exemple, s’inscrit dans une démarche d’information et d’analyse, sans prétendre offrir des réponses définitives, mais en encourageant une lecture plus attentive des interactions numériques.
Pourquoi la compréhension humaine reste essentielle
Les outils techniques évoluent rapidement. Détection automatique, analyse de comportements, filtres adaptatifs. Mais aucun système n’est infaillible, surtout face à des échanges conçus pour rester “normaux”.
La véritable barrière reste la compréhension. Reconnaître une conversation trop lisse, une adaptation excessive au discours de l’autre, ou une cohérence presque parfaite sur la durée n’est pas une compétence technique. C’est une question d’attention.
Une technologie ni bonne ni mauvaise
L’intelligence artificielle n’est pas, en soi, un problème. Les mêmes mécanismes qui permettent l’automatisation de dialogues peuvent aussi servir à détecter des schémas répétitifs ou des comportements atypiques.
Tout dépend de l’usage, du cadre et de la transparence. L’enjeu n’est pas d’opposer innovation et prudence, mais de les faire coexister.
Conclusion
L’IA n’a pas créé la fraude numérique. Elle l’a rendue plus discrète, plus lente, parfois plus crédible. Face à cette évolution, la réponse ne réside ni dans la méfiance systématique ni dans la confiance aveugle.
Observer, prendre du recul, accepter que le “normal” puisse parfois être construit — ce sont désormais des réflexes essentiels. Dans un environnement où l’humain et l’automatisé se rapprochent, la lucidité reste la meilleure protection.
Dans un monde où la technologie simplifie profondément notre quotidien, la domotique s’impose comme une révolution accessible à tous grâce au développement d’outils comme Home Assistant. Cette plateforme open source permet, à partir d’un simple Raspberry Pi 4, de rendre votre habitation véritablement intelligente. Que vous souhaitiez piloter vos éclairages, gérer le chauffage ou assurer la sécurité de votre maison, Home Assistant offre des possibilités vastes d’automatisation personnalisée. Le Raspberry Pi 4, avec sa puissance adaptée et son faible coût, représente le support idéal pour cette aventure. Implémenter Home Assistant sur ce petit bijou technologique transforme votre maison en véritable smart home, alliant confort, efficacité énergétique, et sécurité avancée.
Ce tutoriel détaillé vous accompagnera dans le processus complet d’installation et de configuration pour obtenir une domotique efficace, robuste et sécurisée. Nous aborderons aussi les meilleures pratiques pour optimiser vos automatisations et exploiter pleinement le potentiel de cette box domotique sur mesure, vous garantissant une expérience utilisateur intuitive et performante, à la fois pour les débutants et les passionnés expérimentés.
Préparatifs essentiels pour installer Home Assistant sur Raspberry Pi 4
Avant de plonger dans l’installation proprement dite de Home Assistant, il est fondamental de réunir tout le matériel et les prérequis nécessaires pour garantir une configuration efficace et stable. Le Raspberry Pi 4, disponible en plusieurs variantes selon la taille de la mémoire RAM (2 Go, 4 Go ou 8 Go), est conseillé dans sa version 4 Go ou 8 Go pour assurer une fluidité optimale dans la gestion de multiples appareils et automatisations.
La carte microSD est un élément clé; optez pour un modèle rapide et avec au moins 32 Go d’espace, voire plus pour les projets complexes où de nombreux logs et intégrations s’accumulent. Une bonne alimentation USB-C de 5V 3A stable est également incontournable pour éviter les redémarrages intempestifs liées à une alimentation insuffisante.
Enfin, connectez votre Raspberry Pi 4 à votre réseau local via Ethernet pour une meilleure stabilité ou via Wi-Fi en veillant à être dans une zone de réception optimale. Pour le processus d’installation, vous aurez besoin d’un ordinateur afin d’écrire l’image du système Home Assistant sur la carte SD. L’utilisation d’outils comme balenaEtcher facilite cette étape cruciale et garantit une installation propre.
Voici une liste des étapes préparatoires à ne pas négliger :
Choix du modèle Raspberry Pi 4 adapté : préférez 4 Go ou 8 Go de RAM pour un usage intensif.
Carte microSD performante : privilégiez une classe 10 UHS-I avec un minimum de 32 Go.
Réseau : connexion Ethernet fortement conseillée pour une meilleure réactivité.
Ordinateur avec un OS Windows, MacOS ou Linux : pour flasher l’image Home Assistant.
Pour bien maîtriser ces fondamentaux, vous pouvez consulter ce guide complet sur comment installer Home Assistant sur Raspberry Pi facilement. Vous y retrouverez des conseils adaptés à chaque étape pour éviter les erreurs courantes et optimiser votre installation.
Choisir la version de Home Assistant adaptée à vos besoins
Le monde de Home Assistant s’est beaucoup développé, proposant différentes méthodes d’installation, dont la plus répandue sur le Raspberry Pi 4 est Home Assistant OS. Ce système dédié est optimisé pour la domotique avec un fonctionnement sans intervention sur l’OS sous-jacent. Si vous êtes un utilisateur avancé, vous pouvez aussi envisager Home Assistant Supervised ou Container, mais cela nécessite une bonne maîtrise Linux.
Le choix de Home Assistant OS simplifie la maintenance et les mises à jour avec une interface utilisateur intégrée accessible depuis n’importe quel navigateur de votre réseau local. Ce type d’installation est parfait pour un smart home efficace et pérenne.
Étapes détaillées pour installer Home Assistant sur Raspberry Pi 4
La mise en place de Home Assistant passe par un processus bien défini, comportant plusieurs étapes précises pour garantir un fonctionnement optimal. Une fois que votre matériel est prêt, voici le guide suivi étape par étape :
Téléchargement de l’image Home Assistant OS : Rendez-vous sur le site officiel pour récupérer la version compatible avec Raspberry Pi 4.
Flashage de la carte SD : Utilisez balenaEtcher pour écrire l’image sur votre microSD en toute simplicité.
Premiers branchements : Insérez la microSD dans le Raspberry Pi, branchez l’alimentation et connectez le réseau.
Accès à Home Assistant : Après quelques minutes d’attente, accédez à l’URL http://homeassistant.local:8123 depuis un navigateur sur le même réseau.
Création de compte et configuration initiale : Configurez votre compte utilisateur et commencez à explorer les intégrations disponibles.
Cette simplification du processus d’installation est appréciée des débutants comme des experts. Pour une élaboration plus approfondie et les astuces liées à chaque étape, n’hésitez pas à consulter l’excellent tutoriel disponible sur ce sujet comment installer Home Assistant sur Raspberry Pi 5 pour une maison connectée, qui s’applique aussi directement à la version 4 avec des conseils à jour pour 2026.
Optimiser la configuration réseau pour une domotique fiable
Une bonne installation domotique ne serait rien sans une configuration réseau solide. Si vous avez la possibilité, préférez toujours une liaison filaire Ethernet, qui garantit stabilité et faible latence. Sinon, le Wi-Fi doit être bien sécurisé et performant.
Pensez aussi à définir une adresse IP fixe au Raspberry Pi via votre routeur ou directement dans la configuration réseau de Home Assistant. Cela facilite la gestion des automatisations et l’accès à distance sécurisé. La mise en place d’un VPN ou d’un tunnel sécurisé est recommandée pour piloter votre maison lorsque vous êtes en dehors de votre domicile, limitant ainsi les risques liés à la sécurité en domotique.
Exploiter les potentiels d’Home Assistant pour une domotique efficace et personnalisée
Une fois l’installation et la configuration de base réalisées, la porte s’ouvre vers un univers d’automatisations et d’intégrations permettant d’optimiser votre smart home de manière très précise. Home Assistant supporte des milliers d’appareils connectés, qu’il s’agisse de marques reconnues ou de solutions DIY basées sur ESP32 ou Arduino.
L’un des points forts est la possibilité d’orchestrer les automatismes via des scripts et des scénarios sophistiqués, qui prennent en compte de multiples conditions : horaires, détections de présence, météo, capteurs environnementaux. Cette flexibilité permet non seulement d’améliorer le confort, mais aussi de réduire votre consommation énergétique.
Par exemple, il est possible de commander automatiquement l’ouverture et la fermeture de volets roulants en fonction de la luminosité extérieure et de la température, améliorant ainsi la gestion thermique de la maison. Vous retrouverez un large choix de configurations sur des solutions adaptées dans cet article sur box domotique pour volets roulants.
Liste d’automatisations recommandées pour débuter avec Home Assistant :
Gestion intelligente des éclairages : allumage et extinction en fonction des mouvements et de l’heure.
Contrôle du chauffage : ajustement automatique selon la présence et la température extérieure.
Surveillance des ouvertures : alertes en cas d’ouverture inattendue de portes et fenêtres.
Gestion de la consommation électrique : suivi en temps réel et coupure automatique pour réduire la facture.
Notifications personnalisées : alertes SMS/email en cas d’anomalie ou de détection spécifique.
Sécurité et maintenance pour un système domotique durable et fiable
L’aspect sécurité est primordial pour toute installation domotique, surtout lorsqu’elle est accessible en ligne. Home Assistant propose plusieurs options pour renforcer la protection de votre smart home. L’activation de l’authentification à deux facteurs (2FA) est fortement recommandée afin d’éviter les attaques par brute force.
L’usage de certificats SSL/TLS permet de sécuriser les communications avec votre interface Web, indispensable si vous accédez à votre système de l’extérieur. Pour les mises à jour, Home Assistant dispose d’un système automatique, mais veillez à planifier des sauvegardes régulières de votre configuration pour éviter toute perte lors d’une update ou d’un incident.
Un tableau récapitulatif des meilleures pratiques de sécurité :
Action
Description
Impact sur la sécurité
Activation 2FA
Authentification à deux facteurs obligatoire à chaque connexion
Réduit fortement les risques d’accès non autorisé
Utilisation HTTPS
Installation de certificats SSL/TLS pour accès sécurisé
Chiffrement des échanges, protection contre l’interception
Mises à jour régulières
Installation systématique des dernières versions
Correction des failles de sécurité et bugs connus
Backups fréquents
Sauvegarde automatique de la configuration et des données
Préserve l’intégrité des données en cas de problème
Consacrer du temps à la maintenance et à la sécurisation vous garantit une domotique plus fiable et pérenne. Par ailleurs, pour approfondir la surveillance environnementale et la gestion de la qualité de l’air, vous pouvez découvrir cette station air intelligent Raspberry Pi, parfaite pour une maison encore plus connectée et saine.
Personnaliser et faire évoluer votre installation Home Assistant sur Raspberry Pi 4
Home Assistant offre une modularité qui en fait un outil vivant et évolutif. Vous pouvez ajouter des intégrations selon vos besoins, des assistants vocaux comme Google Assistant ou Alexa, ou encore réaliser des passerelles avec d’autres protocoles comme Zigbee ou Z-Wave via des dongles USB compatibles. Le Raspberry Pi 4 se révèle être un noyau incontournable pour un système domotique complet et performant.
Au fur et à mesure que votre installation grandit, il est conseillé d’organiser vos configurations via des dossiers YAML bien structurés. Utiliser des templates et des personnalisations avancées permet d’affiner vos automatisations, par exemple en intégrant des conditions météo complexes ou des situations spécifiques liées à la sécurité.
Voici quelques conseils pour faire évoluer votre système :
Ajouter des capteurs complémentaires : qualité de l’air, détection fumée, inondation, etc.
Mettre en place des scénarios complexes avec plusieurs conditions pour plus de réactivité.
Utiliser des dashboards personnalisés pour un pilotage intuitif et adapté à chaque membre de la famille.
Synchro avec smartphone grâce à l’application mobile officielle Home Assistant.
Intégrer les derniers protocoles domotiques pour étendre la compatibilité de votre smart home.
Pour aller plus loin dans la découverte des capacités des différentes versions de Raspberry Pi dans ce contexte, vous pouvez parcourir cet article riche en informations sur la découverte des potentialités du Raspberry Pi 3 B dans vos projets informatiques, qui contient des enseignements pertinents pour qui souhaite optimiser ses usages domotiques.
Quelle version de Raspberry Pi 4 choisir pour Home Assistant ?
Pour une domotique efficace, il est conseillé d’opter pour le Raspberry Pi 4 avec 4 Go ou 8 Go de RAM afin de bénéficier d’une meilleure stabilité et gestion des automations.
Est-il nécessaire d’utiliser une connexion Ethernet ?
L’utilisation d’Ethernet est recommandée pour garantir une stabilité maximale de votre système domotique, mais le Wi-Fi peut aussi convenir si la qualité du signal est bonne.
Comment sécuriser mon installation Home Assistant ?
Activez l’authentification à deux facteurs, utilisez HTTPS avec certificats SSL, effectuez les mises à jour régulières, et sauvegardez fréquemment la configuration pour assurer la sécurité et la pérennité.
Puis-je piloter mes volets roulants avec Home Assistant ?
Oui, Home Assistant permet de contrôler facilement vos volets roulants, notamment en profitant de box domotique dédiées comme celles expliquées dans ce guide pour vos volets roulants.
Peut-on accéder à Home Assistant depuis l’extérieur de la maison ?
Accéder à Home Assistant à distance est possible via une configuration VPN ou tunnel sécurisé, indispensable pour protéger l’accès à votre smart home.
Les 14 et 15 février 2026, je vous donne rendez-vous à Vitré pour le salon Tech Inn’Vitré (Usages numériques), organisé par Vitré Communauté et Makeme. Deux jours pour découvrir des usages concrets du numérique, tester, manipuler… et surtout échanger “en vrai”. Tech Inn’Vitré 2026 : rendez-vous les 14 & 15 février au Centre culturel de […]
Dans le paysage numérique actuel, les cybercriminels n’ont plus besoin de compétences techniques extraordinaires pour mener une première reconnaissance approfondie de votre entreprise. Grâce à l’OSINT (Open Source Intelligence), ils peuvent collecter une quantité impressionnante d’informations en exploitant uniquement des sources publiques et légales. Cette phase de reconnaissance, souvent négligée dans les stratégies de défense, constitue pourtant le prélude à la majorité des cyberattaques sophistiquées.
Qu’est-ce que l’OSINT et pourquoi devriez-vous vous en préoccuper ?
L’OSINT désigne l’ensemble des techniques permettant de collecter et d’analyser des informations accessibles publiquement. Contrairement aux idées reçues, il ne s’agit pas de piratage : tout ce que les attaquants découvrent provient de sources parfaitement légales comme les réseaux sociaux, les sites web d’entreprise, les registres publics, les offres d’emploi, ou encore les bases de données techniques accessibles sur internet.
Pour un attaquant, l’OSINT représente une mine d’or. Avant même de tenter une intrusion technique, un cybercriminel peut cartographier votre infrastructure, identifier vos employés clés, comprendre vos technologies, repérer vos fournisseurs et même découvrir vos vulnérabilités potentielles. Cette phase de reconnaissance passive ne laisse généralement aucune trace dans vos systèmes de détection, ce qui la rend particulièrement dangereuse.
Ce qu’un attaquant peut découvrir sur votre entreprise
Informations sur l’infrastructure technique
Les enregistrements DNS publics constituent la première source d’information pour un attaquant. En quelques requêtes, il peut découvrir l’ensemble de vos sous-domaines, identifier vos serveurs de messagerie, localiser vos serveurs web, et même parfois détecter des systèmes mal configurés ou obsolètes. Des outils comme DNSDumpster, SecurityTrails ou Shodan permettent d’automatiser cette collecte et de révéler des actifs que vous avez peut-être oubliés : anciens serveurs de test, environnements de développement exposés, ou interfaces d’administration accessibles depuis internet.
Les métadonnées des documents publiés sur votre site web représentent également une source d’information précieuse. Un simple fichier PDF peut révéler les noms d’utilisateurs, les versions de logiciels utilisés, les chemins de répertoires internes, voire l’adresse IP interne d’un poste de travail. Ces détails apparemment anodins permettent à un attaquant de comprendre votre environnement technique et d’adapter ses stratégies d’attaque.
Données sur les employés et l’organisation
LinkedIn est devenu l’allié involontaire des cybercriminels. En analysant les profils professionnels de vos employés, un attaquant peut reconstituer votre organigramme, identifier les personnes ayant accès aux systèmes critiques, comprendre les technologies que vous utilisez (mentionnées dans les compétences ou expériences), et même repérer les employés mécontents ou récemment licenciés qui pourraient constituer des cibles privilégiées pour des attaques d’ingénierie sociale.
Les offres d’emploi que vous publiez divulguent souvent des informations sensibles sur votre infrastructure. Une annonce pour un “Administrateur Linux spécialisé Kubernetes et AWS” indique clairement votre stack technologique. Une recherche d’un “Expert sécurité pour migration vers Azure” révèle vos projets futurs. Ces informations permettent aux attaquants de préparer des campagnes de phishing ultra-ciblées ou d’identifier les vulnérabilités spécifiques aux technologies que vous utilisez.
Fuites d’informations sensibles
Les bases de données de violations constituent un trésor pour les attaquants. Des plateformes comme Have I Been Pwned recensent les adresses email et mots de passe compromis lors de fuites de données. Un attaquant peut vérifier si les adresses email de votre domaine figurent dans ces bases et tenter des attaques par réutilisation de mots de passe ou des campagnes de credential stuffing.
Les dépôts de code comme GitHub, même publics et apparemment inoffensifs, peuvent contenir des secrets enfouis dans l’historique des commits : clés API, mots de passe de bases de données, tokens d’authentification, ou informations sur l’architecture interne de vos applications. Un développeur qui a accidentellement commité un fichier de configuration contenant des credentials il y a deux ans représente une vulnérabilité, même si le fichier a été retiré par la suite.
Les mesures concrètes pour limiter votre exposition
Hygiène DNS et gestion des actifs numériques
La première étape consiste à établir un inventaire exhaustif de votre surface d’attaque numérique. Réalisez régulièrement des audits OSINT sur votre propre entreprise pour identifier ce qu’un attaquant pourrait découvrir. Utilisez les mêmes outils que les cybercriminels : effectuez des recherches DNS approfondies, scannez vos sous-domaines, vérifiez ce qui est exposé sur Shodan.
Mettez en place une politique stricte de gestion des enregistrements DNS. Supprimez tous les enregistrements obsolètes pointant vers des serveurs désactivés ou des services abandonnés. Limitez les informations exposées dans vos enregistrements TXT, notamment les enregistrements SPF trop verbeux qui listent tous vos serveurs de messagerie et fournisseurs tiers. Considérez l’utilisation de techniques comme le DNS CAA (Certification Authority Authorization) pour contrôler quelles autorités peuvent émettre des certificats pour vos domaines.
Protégez vos informations WHOIS en utilisant les services de confidentialité proposés par votre registrar. Bien que certaines informations doivent légalement rester publiques, minimisez l’exposition des détails personnels et des contacts techniques. Pour les organisations nécessitant un service de cybersécurité à Paris, l’accompagnement professionnel permet d’identifier et de corriger ces expositions souvent négligées.
Contrôle des informations publiques
Établissez des directives claires concernant les informations que vos employés peuvent partager sur les réseaux sociaux professionnels. Sans interdire l’utilisation de LinkedIn, sensibilisez vos équipes aux risques liés au partage excessif d’informations techniques. Un équilibre doit être trouvé entre la promotion de l’expertise de votre entreprise et la divulgation de détails sur votre infrastructure.
Rédigez vos offres d’emploi en minimisant les détails techniques spécifiques. Au lieu de mentionner “Expert Fortinet FortiGate 6.4.8 et Palo Alto PA-5220”, privilégiez des termes génériques comme “Expert en solutions de pare-feu nouvelle génération”. Ces précisions peuvent être partagées lors des entretiens avec les candidats qualifiés, mais n’ont pas leur place dans une annonce publique.
Nettoyez les métadonnées de tous les documents avant publication. Utilisez des outils dédiés ou les fonctionnalités d’exportation “nettoyées” de vos logiciels de bureautique. Mettez en place une procédure systématique de vérification pour tout contenu publié sur votre site web ou partagé publiquement.
Surveillance et détection proactive
Mettez en place une veille active sur les mentions de votre entreprise, de vos domaines et de vos technologies clés. Des outils comme Google Alerts, des plateformes de threat intelligence ou des solutions spécialisées comme DomainTools peuvent vous alerter lorsque de nouveaux sous-domaines similaires aux vôtres sont enregistrés (typosquatting) ou lorsque vos informations apparaissent dans des contextes suspects.
Surveillez régulièrement les bases de données de violations pour vérifier si des credentials de vos employés ont été compromis. Lorsque vous identifiez des adresses email de votre organisation dans ces bases, imposez immédiatement un changement de mot de passe et activez l’authentification multi-facteurs pour les comptes concernés.
Effectuez des audits réguliers de vos dépôts de code source, même ceux qui ont été rendus privés par la suite. Utilisez des outils comme GitGuardian ou TruffleHog pour scanner l’historique des commits à la recherche de secrets accidentellement exposés. Si vous découvrez des credentials compromis, considérez-les comme immédiatement compromis et procédez à leur révocation, même s’ils datent de plusieurs années.
Procédures internes et sensibilisation
La formation de vos équipes constitue votre meilleure défense contre l’exploitation des informations OSINT. Organisez des sessions de sensibilisation spécifiques sur les risques liés au partage d’informations, en illustrant concrètement ce qu’un attaquant peut découvrir et comment il peut l’utiliser. Une démonstration pratique où vous montrez ce que vous avez pu collecter sur votre propre entreprise a généralement un impact bien plus fort qu’une présentation théorique.
Établissez une politique de classification de l’information claire, définissant ce qui peut être partagé publiquement et ce qui doit rester confidentiel. Cette politique doit couvrir non seulement les documents formels mais aussi les conversations sur les réseaux sociaux, les interventions lors de conférences, et même les discussions informelles lors d’événements professionnels.
Créez un processus de revue pour tout contenu destiné à être publié : communiqués de presse, articles de blog techniques, interventions publiques, publications sur les réseaux sociaux d’entreprise. Cette revue ne doit pas être perçue comme une censure mais comme une protection contre les divulgations involontaires d’informations sensibles.
Sécurisation technique complémentaire
Au-delà de la limitation de l’exposition, renforcez votre posture de sécurité pour que même si un attaquant collecte des informations, il ne puisse pas facilement les exploiter. Déployez l’authentification multi-facteurs (MFA) sur tous les systèmes accessibles depuis internet, en particulier les messageries, VPN, et interfaces d’administration. Cette mesure simple rend considérablement plus difficile l’exploitation de credentials volés ou devinés.
Segmentez votre réseau de manière stricte. Même si un attaquant cartographie votre infrastructure externe, la segmentation limite les mouvements latéraux en cas d’intrusion. Implémentez le principe du moindre privilège : chaque compte utilisateur ou service ne doit avoir accès qu’aux ressources strictement nécessaires à sa fonction.
Mettez en place un programme de gestion des vulnérabilités incluant une surveillance active des CVE (Common Vulnerabilities and Exposures) affectant les technologies que vous utilisez. Les informations OSINT permettent aux attaquants de cibler spécifiquement les vulnérabilités de votre stack technologique, rendant la rapidité de correction encore plus critique.
L’importance d’une approche globale
La protection contre l’OSINT ne peut être efficace que dans le cadre d’une stratégie de cybersécurité globale. Elle doit s’intégrer dans une approche de défense en profondeur combinant des mesures techniques, organisationnelles et humaines. Les informations publiques ne représentent qu’une pièce du puzzle de sécurité, mais c’est souvent celle qui permet aux attaquants de lancer leurs premières offensives.
Il est essentiel de comprendre que vous ne pourrez jamais éliminer complètement votre empreinte numérique publique. L’objectif n’est pas de devenir invisible, mais de contrôler ce qui est visible et de s’assurer que même avec ces informations, un attaquant ne puisse pas facilement compromettre vos systèmes. Cette approche équilibrée permet de maintenir votre présence digitale nécessaire à votre activité tout en minimisant les risques.
Des ressources comme le NIST Cybersecurity Framework ou les recommandations de l’ANSSI fournissent des cadres structurés pour développer une stratégie de cybersécurité intégrant la gestion de l’exposition informationnelle.
Conclusion
L’OSINT représente la face émergée de l’iceberg des cybermenaces modernes. Avant même qu’un attaquant ne lance une seule requête malveillante vers vos systèmes, il dispose déjà d’une cartographie détaillée de votre organisation grâce aux informations que vous avez volontairement ou involontairement rendues publiques. Cette réalité exige une prise de conscience et une action immédiate de la part de toutes les organisations, quelle que soit leur taille.
Les mesures présentées dans cet article — hygiène DNS rigoureuse, contrôle des informations publiques, surveillance proactive et sensibilisation des équipes — constituent les fondations d’une défense efficace contre l’exploitation des renseignements de sources ouvertes. Elles ne requièrent pas nécessairement des investissements massifs mais plutôt une approche méthodique et une vigilance constante.
N’attendez pas qu’un incident survienne pour évaluer votre exposition. Réalisez dès aujourd’hui votre propre audit OSINT, regardez votre entreprise avec les yeux d’un attaquant, et mettez en place les correctifs nécessaires. Dans un environnement où la moindre information peut être transformée en vecteur d’attaque, la maîtrise de votre empreinte numérique publique n’est plus une option mais une nécessité stratégique.
À l’heure où la domotique révolutionne notre manière d’interagir avec notre habitat, le Raspberry Pi 5 s’impose comme une solution à la fois puissante et abordable pour créer un serveur domotique performant. Avec l’essor des maisons connectées, il devient essentiel de maîtriser l’installation d’outils clés comme Home Assistant. Cette plateforme open-source, réputée pour sa flexibilité et ses fonctionnalités avancées, permet de centraliser la gestion des objets connectés et d’orchestrer des automatisations intelligentes. Installer Home Assistant sur un Raspberry Pi 5 ouvre ainsi la voie à un contrôle total de son environnement domestique, intégrant éclairage, chauffage, sécurité et assistants vocaux au sein d’un réseau local optimisé.
En 2026, alors que les appareils connectés se multiplient, la prise en main d’un système domotique autonome devient un atout non négligeable pour gérer son confort, réduire sa consommation énergétique et renforcer la sécurité. Le Raspberry Pi 5, avec ses performances accrues et ses capacités de connectivité, facilite grandement la mise en place d’une maison intelligente personnalisée. Suivre un processus d’installation rigoureux, tout en comprenant les besoins et contraintes techniques, est la clé pour exploiter pleinement cet écosystème. Découvrez dans cet article comment procéder étape par étape et quels avantages tirer d’un tel investissement technologique.
Points clés à retenir :
Le Raspberry Pi 5 est idéal pour héberger Home Assistant grâce à sa puissance et ses interfaces modernes.
Home Assistant offre une plateforme domotique complète, compatible avec de nombreux protocoles et assistants vocaux.
Une configuration réseau locale soigneusement pensée garantit la fiabilité et la sécurité des automatisations.
Les étapes d’installation nécessitent une préparation minutieuse du système, du logiciel et des périphériques.
Intégrer des automatisations personnalisées permet d’optimiser le confort et les économies d’énergie.
Une abondance de ressources en ligne facilite l’apprentissage et les améliorations continues.
Les atouts techniques du Raspberry Pi 5 pour un serveur domotique efficace et durable
Le Raspberry Pi 5 représente un tournant dans la gamme des nano-ordinateurs conçus pour les projets technologiques et domotiques. Par rapport à ses prédécesseurs, il propose des avancées notables qui influent directement sur la qualité de l’installation de Home Assistant et son fonctionnement au quotidien.
Architecturé autour d’un processeur quadri-cœur ARM Cortex, cadencé à une fréquence optimisée, ce modèle offre une fluidité accrue lors du traitement des dizaines de capteurs et modules connectés. Le Raspberry Pi 5 intègre également une mémoire vive configurée pour faciliter la gestion simultanée de nombreuses tâches, ce qui est crucial pour un serveur domotique qui doit gérer les capteurs, les commandes et les flux audio d’assistants vocaux utilisés dans la maison.
Sur le plan des interfaces, le Raspberry Pi 5 propose plusieurs ports USB, dont des USB 3.0, garantissant des transferts rapides et fiables pour tout type de périphériques liés à la domotique, tels que des clés Zigbee ou Z-Wave. On note aussi une interface Ethernet Gigabit, un élément-clé pour assurer une connexion réseau locale stable et performante, indispensable pour piloter une maison connectée sans interruption.
En matière de compatibilité logicielle, le Raspberry Pi 5 fonctionne parfaitement avec Home Assistant, qui peut être installé directement sur la distribution Linux Raspbian, optimisée pour cette architecture. Cette symbiose entre le matériel et le logiciel garantit un environnement robuste et sécurisé, capable d’évoluer avec les besoins du foyer.
L’utilisation du Raspberry Pi 5 pour la domotique apporte également des avantages en termes d’économie d’énergie, avec une consommation optimisée qui autorise un fonctionnement continu sans surchauffe ni nécessité de ventilateurs bruyants. Pour des passionnés ou des professionnels souhaitant développer un système domotique fiable, persévérant et évolutif, c’est un choix stratégique incontournable.
Étapes détaillées pour une installation optimale de Home Assistant sur Raspberry Pi 5
Installer Home Assistant sur un Raspberry Pi 5 requiert une démarche structurée afin d’assurer la stabilité et la pérennité de votre solution domotique. Le processus commence par la préparation du matériel et se conclut par la configuration avancée pour la maison connectée.
Préparation du Raspberry Pi 5 et du système d’exploitation
Avant tout, il convient de disposer d’une carte microSD de qualité, de préférence de classe 10 ou supérieure, d’au moins 32 Go pour garantir suffisamment d’espace de stockage. L’étape suivante consiste à télécharger l’image officielle Home Assistant OS, spécialement adaptée au Raspberry Pi 5. Cette image intègre un système minimaliste, pensé pour simplifier la maintenance et améliorer la sécurité.
Le flashage de l’image sur la carte microSD peut s’effectuer avec des outils comme balenaEtcher, qui offrent une interface simple pour éviter les erreurs souvent commises lors de la gravure manuelle. Une fois la carte préparée, il faut insérer celle-ci dans le Raspberry Pi 5 et connecter l’alimentation ainsi que le câble Ethernet pour un démarrage en réseau local sécurisé.
Première mise en route et accès à Home Assistant
Au démarrage, Home Assistant initialise automatiquement les services nécessaires. Sur un navigateur web d’un ordinateur ou smartphone connecté au même réseau local, il suffit d’accéder à l’adresse http://homeassistant.local:8123 pour se connecter à l’interface. Cette URL permet d’éviter la complexité de l’adresse IP, surtout pour les novices. Vous êtes alors guidé pour créer le compte administrateur, définir le fuseau horaire, et commencer à ajouter les premiers appareils connectés.
Configuration réseau et sécurité
Pour assurer un fonctionnement optimal, il est recommandé de configurer une adresse IP statique pour le Raspberry Pi 5, évitant ainsi tous les problèmes liés à une adresse dynamique qui pourrait changer avec le temps. Le contrôleur domotique Home Assistant gagnera ainsi en stabilité et vos automatisations ne seront jamais interrompues.
Sur le plan de la sécurité, activer le chiffrement HTTPS via un certificat SSL, par exemple à travers Let’s Encrypt, est une bonne pratique pour garantir que les échanges entre les appareils et le serveur domotique restent confidentiels. De plus, l’activation d’une double authentification sur le compte administrateur renforce la protection contre les accès non autorisés.
Installation et gestion des integrations
Home Assistant se distingue par la richesse de ses intégrations, compatibles avec une multitude de protocoles et marques. Pour tirer le meilleur parti de votre installation, il est nécessaire de parcourir la bibliothèque des intégrations et de sélectionner celles compatibles avec vos équipements connectés : éclairage Philips Hue, thermostat Nest, assistants vocaux Alexa ou Google Home, capteurs Zigbee, etc.
Le système supporte l’ajout de modules complémentaires (addons) qui enrichissent les possibilités comme la gestion de caméras IP, le téléchargement de données météo, ou encore la configuration de sauvegardes automatiques. Chaque intégration peut être personnalisée pour s’adapter précisément à votre environnement domestique.
Pour approfondir ces étapes, un guide pratique et illustré est accessible sur ce tutoriel complet dédié à l’installation de Home Assistant sur un Raspberry Pi.
Les clés pour optimiser sa maison connectée grâce aux automatisations Home Assistant
La pièce maîtresse d’une installation domotique réside dans l’automatisation intelligente, qui transforme une série de périphériques indépendants en un véritable écosystème interactif au service du confort et de la sécurité.
Home Assistant permet de créer des scénarios sophistiqués grâce à son système de scripts et de règles, activés par des événements détectés par vos capteurs ou des plages horaires prédéfinies. Par exemple, votre éclairage peut s’allumer automatiquement à votre arrivée selon la luminosité extérieure ou la présence détectée. Le chauffage se déclenche en fonction de la température mesurée et de votre emploi du temps.
Une autre fonctionnalité puissante est la gestion des assistants vocaux. Home Assistant s’intègre de manière transparente avec Alexa, Google Assistant ou Siri, offrant ainsi un contrôle vocal précis et fluide. Vous pouvez interagir avec votre maison simplement par la voix, pour déclencher des commandes ou obtenir des informations en temps réel.
Voici une liste de possibilités courantes d’automatisation à considérer :
Gestion de l’éclairage selon l’heure, la présence et la météo.
Contrôle du chauffage et de la climatisation pour réduire la consommation énergétique.
Surveillance vidéo avec envoi d’alertes en cas de mouvement suspect.
Ouverture et fermeture automatique des volets en fonction du soleil.
Scénarios de sécurité avec désactivation automatique de certains appareils à distance.
Notifications personnalisées sur smartphone en cas d’événements particuliers.
Chaque scénario peut être adapté selon les habitudes et besoins du foyer, rendant la maison non seulement plus confortable mais aussi plus intelligente et réactive.
Configurer et sécuriser le réseau local pour une domotique fiable et performante
Le rôle du réseau local est fondamental dans la réussite de l’installation Home Assistant sur Raspberry Pi 5. C’est lui qui assure la communication entre le serveur domotique et tous les équipements connectés.
Un réseau bien configuré réduit les latences, évite les interruptions et garantit une excellente réactivité. Pour cela, privilégiez une connexion Ethernet filaire entre le Raspberry Pi 5 et votre routeur, car elle offre une stabilité et une assurance supérieures à une connexion Wi-Fi, particulièrement dans un environnement dense en interférences.
Pour faciliter la gestion, il est conseillé d’organiser une topologie réseau avec un DHCP réservé au Raspberry Pi, afin de lui attribuer une IP fixe. Cela permet de conserver l’adresse du serveur constante, un prérequis pour que les intégrations Home Assistant fonctionnent sans accrocs. En complément, pensez à utiliser un bon routeur supportant les standards Wi-Fi 6 pour garantir une couverture optimale à tous les appareils mobiles et capteurs sans fil.
La sécurité de votre réseau ne doit pas être négligée. Par défaut, Home Assistant utilise un protocole sécurisé, mais configurer un firewall adapté, bloquer les ports inutiles et activer un VPN pour les accès à distance renforcent significativement la protection de votre installation contre les intrusions.
La gestion et le monitoring du réseau peuvent aussi être facilités par des outils intégrés au Raspberry Pi ou via des addons Home Assistant. Ils vous permettent de suivre en temps réel l’état des connexions et la consommation de la bande passante.
Élément
Recommandation
Avantage
Connexion
Ethernet filaire
Stabilité et faible latence
Adresse IP
IP statique
Fiabilité des automatismes
Sécurité
Utilisation de SSL / VPN / Firewall
Protection contre les intrusions
Routeur
Wi-Fi 6
Couverture et compatibilité améliorées
Exploiter pleinement les possibilités offertes par Home Assistant et le Raspberry Pi 5 en 2026
Avec l’évolution constante des technologies et des besoins, tirer parti du potentiel combiné du Raspberry Pi 5 et de Home Assistant nécessite un apprentissage continu et une adaptation aux nouveaux standards.
On observe actuellement une montée en puissance de l’intelligence artificielle intégrée dans la domotique. Home Assistant intègre progressivement des modules d’apprentissage automatique qui permettent d’optimiser automatiquement les scénarios en fonction de votre comportement et des conditions environnementales.
Profiter des mises à jour régulières assure non seulement un émancipation des fonctionnalités, mais également une sécurité renforcée. La communauté open-source est particulièrement active et propose des extensions pour intégrer des appareils toujours plus variés et des protocoles nouveaux.
L’interopérabilité avec d’autres systèmes domotiques est une autre dimension clé. Le Raspberry Pi 5, grâce à ses entrailles polyvalentes, permet de combiner Home Assistant avec d’autres serveurs ou logiciels, créant une plateforme hybride adaptée aux exigences spécifiques des utilisateurs avancés ou des entreprises.
En parallèle, de nombreux guides et tutoriels, comme ceux proposés par Raspberry Pi France, offrent un soutien précieux pour découvrir des configurations avancées et démarrer même avec un Raspberry Pi Zero W pour compléter ses projets quotidiens. La richesse des ressources disponibles permet donc de dépasser les limites initiales et d’embrasser pleinement ce que 2026 a à offrir en matière de maison connectée.
Quelles sont les spécificités du Raspberry Pi 5 adaptées à Home Assistant ?
Le Raspberry Pi 5 offre un processeur plus rapide, une mémoire optimisée et une connectivité améliorée (USB 3.0, Ethernet Gigabit) pour une gestion fluide et fiable des appareils domotiques avec Home Assistant.
Comment garantir la sécurité de ma maison connectée via Home Assistant ?
Il est essentiel de configurer une adresse IP statique, activer le chiffrement HTTPS, utiliser un VPN pour les accès à distance et mettre en place une double authentification sur votre compte Home Assistant pour protéger votre réseau domotique.
Peut-on automatiser tous les équipements avec Home Assistant sur Raspberry Pi 5 ?
Home Assistant supporte une large gamme d’équipements via ses nombreuses intégrations, ce qui permet d’automatiser l’éclairage, le chauffage, la sécurité, les volets roulants et bien plus encore, selon les protocoles compatibles.
Quelle est la meilleure méthode pour installer Home Assistant sur Raspberry Pi 5 ?
Utiliser l’image officielle Home Assistant OS sur une carte microSD de bonne qualité, suivre les étapes de flashage avec balenaEtcher, puis configurer le système sur un réseau local sécurisé est la méthode recommandée pour garantir une installation fiable.
Le Raspberry Pi 5 peut-il gérer des assistants vocaux intégrés à Home Assistant ?
Oui, le Raspberry Pi 5 permet l’intégration fluide d’assistants vocaux comme Alexa, Google Assistant ou Siri, facilitant le contrôle vocal de votre maison connectée via Home Assistant.
Le marketing mobile est assez apprécié par les entreprises, en raison de son niveau d’efficacité. Pendant longtemps, le SMS a régné en maitre dans ce domaine avec son taux de couverture supérieur à 98%. Avec l’émergence de WhatsApp Business, il existe une vraie concurrence avec les SMS. L’application dispose de nombreux avantages par rapport aux SMS.
La possibilité de faire des contenus riches et interactifs
L’un des plus grands avantages de WhatsApp est sa capacité à transmettre des contenus multimédias variés sans surcoût. Alors qu’il faut se limiter à 160 caractères de texte brut avec le SMS, il est possible d’écrire jusqu’à 1000 caractères sur WhatsApp. Vous pourrez même accompagner vos messages de documents ou d’images.
Grâce à cette richesse de format, l’expérience client et l’efficacité des campagnes sont transformées. Les entreprises ont la possibilité de créer des messages immersifs et engageants qui captent l’attention. Elles peuvent passer par une plateforme comme Pulse Messaging qui résout les problèmes les plus fréquents qu’on rencontre avec le marketing WhatsApp. Avec la plateforme, les entreprises évitent les envois manuels de message et peuvent avoir des statistiques de leurs campagnes.
En plus du partage d’informations, WhatsApp dispose de fonctionnalités interactives. C’est le cas des boutons d’appel à l’action et des réponses rapides préenregistrées qui accélèrent les échanges.
La communication bidirectionnelle
Les entreprises utilisent les SMS comme un canal unidirectionnel. Elles envoient une information et les clients et prospects ne peuvent pas y répondre. Avec WhatsApp, le paradigme est inversé. Il y a en effet une véritable communication entre la marque et le client. Le client peut donc directement demander ce qu’il veut à l’entreprise via WhatsApp.
Grâce à cette capacité de dialogue en temps réel, la qualité du service client est améliorée et il y a moins de frictions dans le parcours d’achat. Un client hésitant peut par exemple avoir des informations sur un produit ou un service de façon instantanée. Il peut également vérifier la disponibilité d’un article ou suivre l’état de sa commande.
FAQ
Quels sont les avantages d’une plateforme WhatsApp ?
Une plateforme WhatsApp résout les problématiques les plus fréquentes des entreprises qui utilisent WhatsApp pour la communication. Avec une telle plateforme, les messages ne sont pas envoyés manuellement, il n’y a pas de segmentation et les difficultés à organiser les contacts sont résolues.
Pour quelle plateforme WhatsApp faut-il opter ?
Il existe de nombreuses plateformes WhatsApp, parmi lesquelles, Pulse Messaging. Cette dernière dispose d’une équipe commerciale expérimentée qui vous accompagne dans votre campagne mobile.
Tout récemment, je voulais utiliser un module RFM69 sur un Compute Module 5 (autrement dit l'équivalent d'un Raspberry-Pi 5) faisant fonctionner un logiciel écrit Python.
Une API MicroPython sous Python
Ecrivant de nombreux pilotes pour MicroPython (Python pour MicroContrôleur), je me suis dit qu'il devait être possible de réutiliser le code MicroPython du RFM69 sous Python sans devoir réécrire tout-ou-une-partie du code pour qu'il fonctionne sur Raspberry-Pi.
Le problème, c'est que Python n'a aucune idée de ce qu'est l'API MicroPython (celle utilisée par MicroPython pour accéder directement à la couche matérielle).
Il existe cependant des moyens d'accéder au matériel depuis Python mais c'est sans aucun rapport avec l'API exposée MicroPython.
L'idée c'est de recréer l'API MicroPython sous Python pour permettre l'utilisation du RFM69 depuis Python:
Ajouter les déclarations d'encodage (nécessaire à Python)
L'image ci-dessous se présente le module RFM69HCW 433MHz . Ce module permet de transmettre des données sur un réseau numérique utilisant le ondes-radios comme medium de transfert. C'est un peu le protocole internet appliqué à la radio.
Comme le Pilote est développé sous le précepte "Plateform Agnostic Driver" de sorte à pouvoir fonctionner indépendamment de la plateforme MicroPython cible.
Les connexions suivantes sont établies entre le module RFM69 et le GPIO Raspberry-Pi.
La broche CS (chip select) est branchée sur le GPIO 25 alors qu'il existe les broches CE0 (GPIO8) et CE1 (GPIO7).
Le problème ici est que CE0 et CE1 sont automatiquement gérés par le système d'exploitation alors que sous MicroPython, c'est le code utilisateur qui gère l'état du signal CS.
Dans le cas présent, la gestion automatique de CE0 et CE1 empêche l'utilisation du burst_read sur le module RFM69 raison pour laquelle le GPIO25 est utilisé comme signal CS (ce signal étant contrôlé par le code utilisateur).
Récupérer l'exemple test_config.py utilisé pour tester la communication avec le module RFM69. Nous y ajoutons également l'information d'encodage dans le fichier.
Couche de compatibilité Python --> MicroPython
Création des fichiers machine.py et micropython.py pour accueillir les classes Pin & SPI ainsi que la déclaration de la fonction const()
Le script le plus intéressant est hack_time.py car celui-ci permet d'ajouter les fonctions MicroPython (ticks_ms, ticks_diff, sleep_ms, etc) manquantes dans Python.
Il ne reste plus qu'a adapter le script d'exemple pour créer l'instance du bus SPI (sur le RPi) et passer le tout à la bibliothèque MicroPython originale.
#!/usr/bin/python
# -*- coding: utf-8 -*-
from machine import SPI, Pin
import hack_time
from rfm69 import RFM69
# Machine.py for Raspberry-Pi 5
spi = SPI( 0 )
nss = Pin( 25, Pin.OUT, value=True ) # Do not use the RPI CE0/CE1, it is not compatible with the Burst_Read of RFM69
rst = Pin( 18, Pin.OUT, value=False )
rfm = RFM69( spi=spi, nss=nss, reset=rst )
rfm.frequency_mhz = 433.1
....
Le bus SPI est rattaché au bus matériel SPI0 & CE0.
Une broche Enabled (nss) alternative est utilisé avec le GPIO25 pour contrôler les transactions du bus SPI. La broche CE0 du GPIO est donc ignorée.
Enfin, le GPIO 10 est utilisé pour réinitialisé le module RFM69.
Au final, la création de l'instance RFM69 et le restant du code (y compris la bibliothèque RFM69) est identique entre MicroPython et Python (sur RPi5).
L'exécution de l'exemple sur le Raspberry-Pi 5 produit le résultat attendu (identique lorsqu'il est exécuté sur un Pico).
test_config.py : exécution de la bibliothèque MicroPython RFM69 sur Raspberry-Pi 5
Ressources
MicroPython-API-for-Python experiment is published on GitHub.
À l’heure où la miniaturisation des appareils électroniques rencontre des besoins grandissants en puissance performante, le Raspberry Pi Zero 2 W s’impose comme une véritable révolution. Cet ordinateur monocarte, d’une taille étonnamment réduite, combine un processeur quadricœur, une connectivité intégrée et une consommation énergétique très maîtrisée. Que ce soit pour les passionnés d’informatique, les makers en quête d’optimisation de leurs projets DIY, ou pour l’éducation et la programmation, ce mini-ordinateur ouvre la porte à des possibilités incomparables à ce niveau de prix. Son format compact ne le prive en rien de sa rapidité ni de sa puissance, faisant de lui un incontournable pour les applications embarquées, l’électronique ou encore les objets connectés.
Avec un rapport qualité/prix particulièrement attractif, cette solution accessible permet de réaliser des projets innovants et complexes sans se ruiner, tout en restant compatible avec un large écosystème de composants et logiciels. Sa communauté dynamique et la richesse de la documentation facilitent la compréhension et l’expérimentation, même pour les débutants. Découvrez ici pourquoi le Raspberry Pi Zero 2 W figure parmi les mini-ordinateurs les plus polyvalents de 2026, capable de répondre aussi bien à des besoins éducatifs qu’à des exigences technologiques avancées.
En bref :
Mini-ordinateur ultraportable et économique avec des performances jusqu’à 5 fois supérieures à la version précédente.
Processeur ARM quadricœur à 1 GHz, 512 Mo de RAM LPDDR2, Wi-Fi 2,4 GHz et Bluetooth 4.2 intégrés.
Idéal pour les projets DIY en électronique, l’intégration IoT, la domotique, le retro-gaming léger et l’éducation.
Compatible avec un large éventail de systèmes d’exploitation Linux, avec un support étendu de la communauté.
Consommation électrique très faible (0,6 W au repos), adaptée aux projets autonomes sur batterie.
Les caractéristiques techniques du Raspberry Pi Zero 2 W : un concentré de technologie dans un format ultra-compact
Le Raspberry Pi Zero 2 W représente aujourd’hui un exemple remarquable de miniaturisation tout en intégrant des composants hautement performants. Mesurant seulement 65 mm de long sur 30 mm de large et pesant à peine 11 grammes, cette carte unique emballe une puissance étonnante grâce à son processeur Broadcom BCM2710A1, un quadricœur 64 bits ARM Cortex-A53 cadencé à 1 GHz, identique à celui de la Raspberry Pi 3.
Cette augmentation massive de puissance permet d’exécuter confortablement des tâches autrefois réservées à des ordinateurs beaucoup plus volumineux. Avec 512 Mo de RAM LPDDR2, ce mini-ordinateur assure une gestion fluide des processus multitâches tout en restant suffisamment léger pour limiter la consommation d’énergie.
En termes de connectivité, la Raspberry Pi Zero 2 W intègre nativement le Wi-Fi b/g/n sur la bande 2,4 GHz, ainsi que le Bluetooth 4.2 avec Bluetooth Low Energy, garantissant des échanges rapides et efficaces pour les projets réseau et IoT. Le support du port CSI-2 pour caméra permet l’ajout du module caméra Raspberry Pi officiel, parfait pour des applications vidéo embarquées, surveillance ou création multimédia légère.
Malgré ses dimensions réduites, la carte inclut un port mini HDMI capable de diffuser jusqu’à du 1080p 30 fps. On y trouve aussi un port micro-USB OTG pour les périphériques, un port micro-USB dédié à l’alimentation, ainsi que 40 broches GPIO au format standard pour connecter de nombreux capteurs, LED ou modules divers. Cette dernière est souvent livrée sans le header GPIO soudé, offrant la flexibilité de personnaliser son montage selon les besoins.
Le tableau ci-dessous synthétise ses caractéristiques essentielles, utiles pour comparer cette version 2 à d’autres modèles de Raspberry Pi en 2026 :
Caractéristique
Raspberry Pi Zero 2 W
Raspberry Pi Zero W (1ère génération)
Raspberry Pi 3 Model B
Processeur
Broadcom BCM2710A1 quadricœur 1 GHz
Single-core 1 GHz
Broadcom BCM2837 quadricœur 1,2 GHz
Mémoire RAM
512 Mo LPDDR2
512 Mo LPDDR2
1 Go LPDDR2
Connectivité sans fil
Wi-Fi 802.11 b/g/n + Bluetooth 4.2 BLE
Wi-Fi 802.11 b/g/n + Bluetooth 4.1
Wi-Fi 802.11 b/g/n + Bluetooth 4.1
Ports USB
1 micro-USB OTG
1 micro-USB OTG
4 USB 2.0
Video
Mini HDMI 1080p30
Mini HDMI 1080p30
HDMI 1080p60
GPIO
40 broches (header non soudé / option soudé)
40 broches
40 broches
Consommation
~0,6 W au repos, jusqu’à 3 W en charge
~0,5 W au repos
~2,7 W au repos
Dimensions
65 x 30 x 5 mm
65 x 30 x 5 mm
85 x 56 x 17 mm
Poids
11 g
9 g
45 g
Un acteur majeur pour tous ceux voulant allier performance et miniaturisation, il s’avère parfait pour réaliser un large éventail de projets électroniques à moindre coût, que vous soyez débutant ou expert. Pour approfondir sur ses usages, faites un tour par cette boutique spécialisée.
Utiliser le Raspberry Pi Zero 2 W pour des projets DIY innovants en domotique et électronique embarquée
La magie de ce mini-ordinateur puissant ne réside pas uniquement dans sa technologie embarquée, mais aussi dans la capacité qu’il offre aux fabricants et créateurs de projeter leur imagination dans des objets connectés intelligents et autonomes. Pourvu de nombreuses interfaces, le Raspberry Pi Zero 2 W assure la parfaite liaison entre matériel et logiciel, ce qui le rend incontournable dans le monde de l’électronique et des projets Arduino-like mais sous Linux.
Parmi les projets DIY phares, la mise en place d’une station météo intelligente illustre bien cette flexibilité. En combinant capteurs sensibles tels que le DHT22 pour mesurer la température et l’humidité, ou encore le BMP180 pour la pression atmosphérique, il devient possible de compiler des données fiables et exploitable en temps réel sur un tableau de bord web accessible depuis n’importe quel appareil connecté. Grâce au faible encombrement et à une consommation électrique maîtrisée, ce système peut même fonctionner plusieurs jours de manière autonome, alimenté par une batterie rechargeable. L’usage de langages de programmation accessibles comme Python et de frameworks légers tels que Flask facilite l’intégration, même pour les moins aguerris.
Un autre projet couramment développé est le système de surveillance discrète. Couplé à une caméra spécialement conçue pour Raspberry Pi, la carte Nano se fond aisément dans l’environnement. Ainsi, il est possible d’assurer la capture vidéo sécurisée en continu, ou à la détection de mouvements, pour la maison ou un bureau. Pour ces applications, il est conseillé d’optimiser la résolution afin de réduire la consommation sans compromettre la qualité du flux, souvent encodé en H.264. L’ajout d’options comme l’accès distant sécurisé via SSH ou HTTPS offre un confort d’utilisation accru.
Les détecteurs de mouvements intelligents, basés sur des capteurs PIR et intégrés à un système domotique via le Raspberry Pi Zero 2 W, transforment votre domicile en un environnement sûr. L’envoi automatique de notifications instantanées en cas d’activité détectée est désormais accessible à tous et profite des ressources d’une communauté active pour personnaliser les alertes.
Voici quelques utilisations courantes que ce mini-ordinateur rend possibles :
Automatisation résidentielle : contrôle de l’éclairage, volets roulants, température.
Contrôle et pilotage des robots éducatifs ou projets robotiques expérimentaux.
Programmation de télécommandes universelles infrarouges compactes.
Création d’un serveur local ultra-léger pour le partage de fichiers.
Mise en œuvre de consoles de jeux rétro portables pour les nostalgiques.
Par son prix accessible et sa puissance respectable, le Pi Zero 2 W est une porte ouverte vers de nombreuses innovations, qu’il soit accompagné ou non d’un boîtier adapté, que vous pouvez consulter parmi les options proposées chez les revendeurs spécialisés en matériel électronique.
Comprendre les performances et la consommation énergétique du Raspberry Pi Zero 2 W : un équilibre optimal
Lorsque l’on parle de mini-ordinateur, l’équilibre entre puissance et consommation est souvent un défi. Grâce à une architecture moderne, le Raspberry Pi Zero 2 W surpasse largement son prédécesseur avec une amélioration des performances d’environ cinq fois, tout en maintenant une consommation très basse. En pratique, son alimentation requiert environ 600 mA au repos, soit environ 0,6 watt, et peut monter jusqu’à 3 watts en utilisation poussée.
Cette caractéristique fait de lui un candidat idéal pour les projets mobiles ou embarqués utilisant des batteries. Par exemple, une station météo équipée d’une batterie lithium rechargeable de 10 000 mAh peut fonctionner pendant plus de 60 heures si les mesures son prises toutes les dix minutes, ce qui illustre la parfaite adéquation du matériel avec des scénarios de terrain nécessitant autonomie et fiabilité.
Au-delà de l’efficacité énergétique, la vitesse de calcul permet de gérer sans difficulté les tâches demandant de la simultanéité et un traitement fluide des données. La capacité à décoder des vidéos H.264 en 1080p à 30 images par seconde ouvre également le champ à des usages multimédias, surveillance ou divertissement de qualité. Ces performances tout en légèreté le distinguent sur le marché des mini-ordinateurs en 2026, particulièrement dans des environnements où l’espace et la consommation énergétique sont critiques.
En complément, la gestion du système d’exploitation, que ce soit sur Raspberry Pi OS officiel ou une des nombreuses alternatives Linux compatibles, optimise encore la rapidité et la stabilité, ce qui est primordial pour une expérience utilisateur satisfaisante et sans latence.
Par conséquent, le Pi Zero 2 W s’intègre parfaitement dans les applications éducatives où l’efficacité est primordiale, ou dans les projets d’automatisation exigeant une réponse rapide mais durable, comme on peut le découvrir en détails sur ce guide complet consacré aux systèmes d’exploitation adaptés à ces mini-ordinateurs : les systèmes d’exploitation pour Raspberry Pi.
Exploiter pleinement la programmation et l’écosystème logiciel pour optimiser vos projets Raspberry Pi Zero 2 W
Connaître les caractéristiques matérielles ne suffit pas pour tirer parti d’un mini-ordinateur aussi performant que le Raspberry Pi Zero 2 W. C’est dans sa compatibilité logicielle et son environnement de développement que réside une part majeure de sa polyvalence. Cet appareil est 100 % compatible avec la majorité des distributions Linux ARM, dont le classique Raspberry Pi OS, qui propose un écosystème complet d’outils pour la programmation et la création de projets électroniques.
Les développeurs, qu’ils soient débutants ou avancés, peuvent bénéficier de langages adaptés comme Python, C, C++, et même JavaScript pour la gestion web via Node.js. De nombreux exemples de code, tutoriels et bibliothèques sont disponibles pour interagir avec les GPIO, piloter des capteurs, gérer la communication sans fil ou manipuler le matériel vidéo.
Les makers adorent notamment utiliser des frameworks légers pour créer des interfaces graphiques simples, accessibles via un navigateur web ou des applications mobiles. Cet aspect permet de rendre l’expérience utilisateur plus intuitive qu’un traditionnel terminal en ligne de commande. Avoir à disposition des ressources pédagogiques fiables est également un plus pour les enseignements en informatique et technologies.
Voici une liste des atouts logiciels majeurs pour le Raspberry Pi Zero 2 W :
Support complet de Raspberry Pi OS avec mises à jour régulières.
Compatibilité avec des IDE célèbres (Thonny, VS Code, Geany).
Librairies pour gestion des GPIO et protocoles de communication SPI, I2C, UART.
Serveurs web légers (Apache, Nginx) pour héberger des projets IoT.
Emulateurs rétro-gaming comme RetroArch, avec optimisations adaptées au SoC.
Outils de surveillance réseau et maintenance à distance (SSH, VNC).
Pour ceux qui souhaitent aller plus loin, un bon point de départ consiste à explorer les tutoriels complets et documentations riches disponibles sur des sites dédiés à la programmation et projets DIY avec Raspberry Pi.
Applications pratiques du Raspberry Pi Zero 2 W en éducation, domotique et loisirs technologiques
Dans l’univers de l’éducation, ce mini-ordinateur puissant et accessible est un outil de choix pour initier les élèves à l’informatique sans nécessiter de matériel coûteux. Son faible encombrement permet de l’utiliser facilement en classe ou dans des ateliers, où il peut devenir la base d’expérimentations en programmation, électronique, robotique et Internet des Objets (IoT).
En domotique, les capacités du Pi Zero 2 W lui donnent une place de choix dans des systèmes automatisés et connectés. Grâce à ses interfaces, il peut piloter en temps réel des dispositifs d’éclairage intelligent, des capteurs divers et des actionneurs pour gérer l’énergie au sein d’une maison. La possibilité d’associer ces capacités à des plateformes domotiques comme Home Assistant facilite la création d’environnements sur mesure capables de réduire les coûts énergétiques et d’améliorer la sécurité.
Les amateurs de retrogaming profitent quant à eux de sa compatibilité avec des émulateurs pour recréer leurs consoles favorites sur un format ultra-portable. Couplé à un petit écran LCD et une batterie, le Raspberry Pi Zero 2 W peut ainsi se transformer en mini-console offrant des heures de divertissement.
Les projets pratiques et accessibles incluent :
Initiation à la programmation et à l’électronique dans un cadre scolaire ou associatif.
Création de systèmes de contrôle à distance pour la maison ou le bureau.
Développement de dispositifs multimédias embarqués (boîte à musique connectée, affichage dynamique).
Exploration avancée de la robotique grâce à ses ports GPIO et à sa puissance de calcul.
Outils de prototypage rapide pour inventer des produits ou services innovants.
Ce mini-ordinateur reste donc un excellent choix multidisciplinaire, dépassant souvent les attentes initiales grâce à sa flexibilité. Pour aller plus loin, les tutoriels spécialisés permettent de maîtriser en détail son intégration dans divers contextes éducatifs et professionnels.
Quelle est la principale différence entre le Raspberry Pi Zero 2 W et le Raspberry Pi Zero original ?
Le Raspberry Pi Zero 2 W est équipé d’un processeur quadricœur ARM Cortex-A53 à 1 GHz, apportant environ 5x plus de puissance que le processeur monocœur du Pi Zero original, tout en conservant un format compact. Cette amélioration permet de mieux gérer des applications plus complexes et multitâches.
Peut-on utiliser le Raspberry Pi Zero 2 W pour des projets IoT autonomes ?
Oui, grâce à sa faible consommation énergétique (environ 0,6 W au repos) et sa connectivité Wi-Fi intégrée, le Raspberry Pi Zero 2 W est parfaitement adapté pour des projets IoT autonomes alimentés par batterie.
Le Raspberry Pi Zero 2 W nécessite-t-il des accessoires spécifiques pour fonctionner ?
La carte est vendue seule, sans alimentation, carte mémoire, ni câbles. Il est donc nécessaire d’acquérir une alimentation compatible, une carte microSD pour le stockage, ainsi que des périphériques d’entrée/sortie selon les besoins comme un clavier, écran ou boîtier pour optimiser l’utilisation.
Quels systèmes d’exploitation sont compatibles avec le Raspberry Pi Zero 2 W ?
Le Raspberry Pi Zero 2 W supporte majoritairement les distributions Linux orientées ARM, dont l’officielle Raspberry Pi OS, mais aussi diverses variantes comme Ubuntu Mate ou Debian. Cela permet de choisir selon les besoins, menus légers ou plus complets.
Comment programmer le Raspberry Pi Zero 2 W pour un projet débutant en électronique ?
Le langage Python, grâce à sa simplicité et à ses nombreuses bibliothèques pour gérer les GPIO, est largement recommandé pour les débutants. Des tutoriels et exemples sont disponibles en ligne pour vous guider étape par étape à travers vos premiers projets DIY.
La SunFounder Fusion HAT+ ressemble à un simple HAT pour Raspberry Pi… jusqu’au moment où vous réalisez que c’est plutôt un couteau suisse pour robot “assisté par IA”. Elle ne “fait” pas l’IA toute seule : les neurones restent sur le Raspberry Pi (un Pi 5 dans mon cas), mais la carte apporte le muscle […]
En 2026, le Raspberry Pi 4 Model B continue de s’imposer comme un micro-ordinateur incontournable pour les professionnels, les passionnés de technologie et les amateurs de projets DIY. Grâce à des améliorations notables en matière de performance, de connectivité et de compatibilité, cet appareil compact offre une expérience polyvalente qui dépasse largement les attentes initiales des premiers modèles Raspberry Pi. Que ce soit pour transformer votre bureau en une station de travail compacte, créer un centre multimédia fluidifié ou mettre en place des projets domotiques innovants, le Pi 4 Model B se présente comme une solution robuste et évolutive.
Doté d’un processeur puissant, il permet d’exécuter des applications exigeantes, tout en restant accessible aux novices grâce à sa large communauté et à ses nombreux supports en ligne. Cet engouement persistant s’explique également par la capacité du Raspberry Pi à intégrer aisément diverses technologies, de la connectivité réseau avancée aux interfaces GPIO adaptées à toutes sortes de montages électroniques. Dans cet article, nous vous proposons un examen approfondi des fonctionnalités clés qui font du Raspberry Pi 4 Model B un choix privilégié en 2026, pour vos usages domestiques ou professionnels.
Processeur quadricœur 64 bits offrant une puissance accrue
Prise en charge du double affichage 4K pour une expérience multimédia enrichie
Connectivité avancée avec USB 3.0, Ethernet Gigabit et Wi-Fi amélioré
Interface GPIO pour des projets électroniques personnalisés
Compatibilité étendue avec nombreuses distributions Linux et systèmes d’exploitation alternatifs
Raspberry Pi 4 Model B : Des performances de processeur révolutionnaires pour un micro-ordinateur polyvalent
Le Raspberry Pi 4 Model B se distingue par son processeur quadricœur Cortex-A72 64 bits cadencé à 1,5 GHz, offrant un gain de performances significatif par rapport aux modèles précédents. Cette puissance accrue se traduit non seulement par une meilleure gestion des tâches multitâches, mais aussi par la capacité à exécuter des applications plus lourdes comme des environnements de développement intégrés, la navigation web avancée, et même des logiciels de montage vidéo basiques.
Par exemple, les utilisateurs peuvent désormais utiliser leur Raspberry Pi 4 pour programmer en Python, Java ou C++, tout en exécutant simultanément des serveurs légers ou des bases de données. Cette polyvalence est particulièrement appréciée par les développeurs et les amateurs d’éducation technologique, car elle ouvre un large éventail de possibilités sans nécessiter d’équipements coûteux.
En complément, la mémoire vive évolutive jusqu’à 8 Go permet de stocker plus de données en mémoire, accélérant ainsi les processus et offrant une meilleure fluidité. Un étudiant qui monte des projets robotisés peut ainsi intégrer des calculs complexes sur son Raspberry Pi 4 Model B, tout en gardant une interface graphique réactive.
La performance renforcée de ce micro-ordinateur permet également d’envisager des applications industrielles légères, où la rapidité de traitement est essentielle. Plusieurs entreprises de gestion de production automatisée intègrent aujourd’hui le Raspberry Pi comme contrôleur secondaire, profitant de sa robustesse et d’une consommation électrique très raisonnable.
Connectivité avancée et interfaces diversifiées pour optimiser vos projets en 2026
Un autre atout majeur du Raspberry Pi 4 Model B réside dans sa connectivité enrichie, qui facilite grandement l’intégration dans des setups variés. Il dispose de ports USB 3.0, offrant des débits jusqu’à dix fois supérieurs à l’USB 2.0, idéal pour les transferts de données volumineux sur disques externes ou périphériques haut débit.
L’Ethernet Gigabit assure une connexion filaire ultra-rapide ainsi que la stabilité nécessaire pour des transferts en réseau ou pour des serveurs locaux. Couplé au Wi-Fi amélioré (802.11ac), le Raspberry Pi 4 permet une connectivité sans fil fluide, indispensable pour les projets mobiles ou les environnements où le câblage reste limité.
La sortie vidéo via deux ports micro-HDMI permet une double gestion d’affichages en 4K. Cette fonctionnalité est idéale pour ceux qui désirent utiliser leur Raspberry Pi comme un mini-pc bureau avec deux moniteurs, ou pour des applications audiovisuelles de haute qualité comme des kiosques interactifs ou des stations de diffusion multimédia.
De plus, ces interfaces facilitent le recours à un large écosystème d’accessoires compatibles, comme les modules Wi-Fi, les dispositifs d’alimentation USB-C, ou encore les ventilateurs spécifiques permettant de maîtriser la température lors des opérations intensives.
Ces évolutions démontrent que le Raspberry Pi 4 Model B est pensé pour s’adapter à l’ensemble des besoins des utilisateurs modernes, tant pour des projets DIY que pour des applications professionnelles. La richesse de son hardware garantit aussi une compatibilité étendue avec des extensions matérielles basées sur GPIO, renforçant encore les possibilités d’innovation.
Exploiter les broches GPIO : clés pour vos projets DIY et électroniques sur-mesure
Le port GPIO (General Purpose Input/Output) du Raspberry Pi 4 Model B demeure l’un des éléments les plus attractifs pour les développeurs et bricoleurs souhaitant personnaliser leurs projets électroniques. Ces 40 broches programmables permettent d’interagir avec toutes sortes de capteurs, relais, boutons ou écrans, ouvrant la voie à une infinité de solutions sur mesure.
En 2026, grâce à une documentation de plus en plus aboutie et des bibliothèques logicielles enrichies, même les débutants peuvent créer des installations domotiques, des robots contrôlés à distance ou des systèmes de surveillance personnalisés avec ce micro-ordinateur.
Par exemple, un hobbyiste peut configurer son Raspberry Pi pour piloter les volets roulants de sa maison ou collecter des données environnementales via des capteurs de température, lumière et humidité. Ces données peuvent ensuite être affichées en direct sur un écran relié à la carte ou envoyées via internet pour une consultation à distance.
Les GPIO offrent ainsi une véritable porte d’entrée vers la créativité technologique, en combinant programmation, électronique et connectivité. Cette capacité de personnalisation est au cœur de nombreux projets innovants, qu’ils soient pédagogiques ou industriels.
L’adaptabilité des broches GPIO est aussi l’un des facteurs favorisant l’implantation du Raspberry Pi 4 dans les ateliers de prototypage rapide, où la rapidité de mise en œuvre et la flexibilité sont cruciales.
Compatibilité et écosystème logiciel : choisir la meilleure OS pour votre Raspberry Pi 4 Model B en 2026
En matière de compatibilité, le Raspberry Pi 4 Model B en 2026 bénéficie d’un vaste éventail de systèmes d’exploitation. L’option la plus courante reste Raspberry Pi OS, une distribution Linux optimisée spécifiquement pour ce micro-ordinateur. Celle-ci garantit une expérience fluide et adaptée aux contraintes matérielles, avec un accès aux milliers d’applications libres et open source.
Cependant, d’autres OS, tels que Ubuntu, LibreELEC (spécialisé dans les centres multimédias) ou même des versions compatibles de Windows 11, sont désormais parfaitement opérationnels sur le Pi 4 Model B. Cette diversité de choix permet de répondre précisément aux besoins spécifiques de chaque utilisateur, qu’il souhaite un système stable pour un serveur, une interface graphique riche pour le multimédia ou un environnement de programmation.
La communauté active autour du Raspberry Pi maintient régulièrement à jour les pilotes et firmwares, ce qui assure la pérennité de la compatibilité logicielle et une prise en charge rapide des nouveautés.
Par ailleurs, la disponibilité de tutoriels et de manuels détaillés facilite grandement l’installation et la configuration des systèmes d’exploitation. Un tutoriel accessible sur l’installation de Windows 11 sur Raspberry Pi 4 montre l’évolution impressionnante de cet écosystème.
Accessoires et meilleures pratiques pour tirer pleinement parti du Raspberry Pi 4 Model B
Pour optimiser l’utilisation de votre Raspberry Pi 4 Model B, plusieurs accessoires incontournables sont à considérer. Parmi eux, le boîtier officiel joue un rôle essentiel pour protéger la carte tout en améliorant la gestion thermique, en particulier associé à un petit ventilateur adapté qui prévient la surchauffe lors d’utilisation intensive.
Les différents câbles micro-HDMI permettent d’exploiter le double affichage 4K nativement supporté, ce qui est un véritable avantage pour les utilisateurs cherchant une station de travail compacte pour le multitâche ou le streaming vidéo de qualité. La gestion de l’alimentation via une connexion USB-C assure par ailleurs que le micro-ordinateur dispose d’une alimentation stable et suffisante, un point crucial souvent négligé par les novices.
Enfin, le choix de la carte microSD joue un rôle fondamental. En 2026, il est recommandé d’opter pour des cartes de haute performance et d’au moins 32 Go, préinstallées ou non avec des images systèmes optimisées pour le Pi 4, garantissant un démarrage rapide et une bonne réactivité globale.
Accessoire
Fonction principale
Avantages
Boîtier officiel Raspberry Pi 4B
Protection et gestion thermique
Préserve la carte, réduit la surchauffe, améliore la durabilité
Ventilateur de boîtier
Refroidissement actif
Maintient la performance en charge lourde, prolonge la vie des composants
Câble Micro-HDMI vers HDMI
Sortie vidéo double 4K
Permet une configuration multi-écran, donne une image de qualité
Carte microSD 32 Go performante
Stockage système et données
Démarrage rapide, espace adapté aux applications diverses
Alimentation USB-C 5V/3A
Alimentation stable
Assure une stabilité électrique, évite les interruptions
Adopter ces accessoires vous assurera une expérience optimale et sécurisée, que ce soit pour un usage personnel ou dans un cadre professionnel. Amateur ou expert, ces compléments vous ouvrent davantage la porte vers l’exploitation complète de la multitude de fonctionnalités offertes par ce micro-ordinateur. Pour en savoir plus sur ces choix et conseils, la page dédiée à où acheter un Raspberry Pi 4 vous guidera vers les meilleures options du marché.
En explorant ces pistes d’optimisation matérielle, il devient évident que le Raspberry Pi 4 Model B en 2026 conserve son statut d’outil flexible et puissant, combinant simplicité d’utilisation et capacités avancées. Que ce soit pour débuter une carrière dans l’informatique embarquée ou pour donner vie à votre prochain projet connectée, cette plateforme est une base solide, soutenue par une communauté active et des ressources sans cesse enrichies.
Quelle est la principale amélioration du processeur du Raspberry Pi 4 Model B par rapport aux modèles précédents ?
Le Raspberry Pi 4 Model B dispose d’un processeur quadricœur Cortex-A72 64 bits cadencé à 1,5 GHz, ce qui représente une nette amélioration en termes de vitesse et de capacité multitâche par rapport aux modèles antérieurs.
Comment le Raspberry Pi 4 Model B gère-t-il la connectivité réseau ?
Le Raspberry Pi 4 Model B offre une connectivité robuste via un port Ethernet Gigabit pour des échanges rapides en filaire, un Wi-Fi 802.11ac performant ainsi que plusieurs ports USB 3.0 pour brancher divers périphériques.
À quoi servent les broches GPIO sur le Raspberry Pi 4 ?
Les broches GPIO permettent de connecter et contrôler une grande variété de composants électroniques pour créer des projets DIY personnalisés, comme des systèmes domotiques ou des robots.
Quels systèmes d’exploitation sont compatibles avec le Raspberry Pi 4 Model B ?
Outre Raspberry Pi OS, ce micro-ordinateur supporte plusieurs systèmes comme Ubuntu, LibreELEC et même des versions optimisées de Windows 11, offrant ainsi une grande flexibilité selon l’utilisation souhaitée.
Quels accessoires sont indispensables pour une utilisation optimale du Raspberry Pi 4 ?
Les accessoires incontournables incluent le boîtier officiel pour protéger la carte, un ventilateur pour le refroidissement, des câbles micro-HDMI pour un affichage double 4K, une alimentation USB-C stable et une carte microSD performante.
Le monde des tipsters au Canada connaît une croissance fulgurante, attirant autant de pronostiqueurs légitimes que d’escrocs. Naviguer dans cet univers demande vigilance et discernement pour les parieurs qui cherchent à maximiser leurs chances de gains. Comprendre comment identifier les vrais experts, reconnaître les signes d’arnaques et protéger son capital de jeu est devenu essentiel pour quiconque souhaite profiter des conseils de tipsters sans risquer de se faire piéger.
Tipsters fiables au Canada : guide pour les identifier
Pour les parieurs au Canada, il est crucial de distinguer les bons tipsters des escrocs potentiels. Apprendre à évaluer la crédibilité d’un tipster peut faire toute la différence pour protéger votre bankroll. Pour vous aider dans cette démarche, consultez cette revue spécialisée sur les bookmakers numériques, qui offre des avis et conseils sur les plateformes fiables de paris sportifs en ligne. Cela vous permettra de prendre des décisions plus éclairées et d’éviter les pièges courants.
Les tipsters dignes de confiance se distinguent par leur transparence et leur historique vérifiable de pronostics. Ils proposent généralement un suivi détaillé de leurs performances passées et n’hésitent pas à montrer leurs échecs autant que leurs réussites.
Évaluer efficacement un tipster compétent
Un bon tipster ne se contente pas de lancer des prédictions au hasard. Il propose des analyses approfondies qui éclairent ses choix, donnant ainsi aux parieurs une compréhension claire de ses raisonnements. La transparence dans sa méthodologie est fondamentale pour instaurer la confiance et permettre à chacun de suivre son processus intellectuel.
Ce professionnel du pari mise sur la constance et l’expertise pour maintenir un taux de réussite stable sur le long terme. Ses pronostics ne s’arrêtent pas là : il accompagne chaque recommandation de conseils avisés en matière de gestion de bankroll, spécifiquement adaptés aux réalités du marché canadien. Grâce à cette approche rigoureuse et réfléchie, les parieurs peuvent naviguer avec plus d’assurance dans l’univers complexe du betting.
Évaluer l’empreinte numérique des entreprises
Les discussions entre parieurs et les échanges sur les forums spécialisés canadiens peuvent être une véritable mine d’or pour évaluer la fiabilité d’un tipster. En prêtant attention aux commentaires et aux expériences partagées, on peut se faire une idée précise de sa crédibilité.
Les meilleurs tipsters savent créer une communauté active autour d’eux. Ces experts ne promettent jamais monts et merveilles sans fondement. Au contraire, ils répondent aux questions avec transparence et honnêteté, renforçant ainsi la confiance parmi ceux qui les suivent. C’est souvent dans ces interactions sincères que se révèle leur véritable savoir-faire.
Arnaques à éviter : pièges courants et astuces malveillantes
Les arnaques liées aux tipsters se multiplient sur les réseaux sociaux, particulièrement Instagram et Telegram. Ces escrocs utilisent souvent des captures d’écran falsifiées de paris gagnants et des témoignages fictifs pour attirer les parieurs novices.
Stratégies subtiles de manipulation psychologique
Faites attention aux tipsters qui jouent sur l’urgence ou qui tentent de vous faire céder sous la pression sociale. Les promesses de gains mirobolants et les systèmes prétendument infaillibles sont des drapeaux rouges à ne pas ignorer.
Ces stratégies visent souvent à vous faire prendre une décision hâtive sans vraiment réfléchir. Un conseil avisé ? Prenez le temps d’analyser chaque proposition avec un œil critique et un esprit calme. Les marchés financiers récompensent la patience et la prudence, pas la précipitation.
Arnaques des offres alléchantes en ligne
Les tipsters peu scrupuleux ne manquent pas d’imagination pour vous appâter. Ils commencent souvent par proposer des abonnements à tarif cassé ou même des premiers conseils sans frais. Ces approches initiales, aussi séduisantes soient-elles, cachent souvent une intention bien moins innocente.
Les tipsters au Canada peuvent être une ressource précieuse pour parier, mais il est crucial de rester vigilant face aux arnaques potentielles. Certains tipsters peu scrupuleux promettent des gains garantis, ce qui devrait toujours éveiller la méfiance. Pour éviter de tomber dans ces pièges, il est conseillé de consulter des sources fiables et d’effectuer une analyse d’experts en sites de jeux en ligne afin d’évaluer la crédibilité des plateformes utilisées. En gardant votre bankroll protégée et en choisissant judicieusement vos sources d’information, vous maximisez vos chances de succès tout en minimisant les risques.
Leur véritable objectif ? Vous pousser à souscrire à des forfaits premium. Mais attention, ces offres promettent souvent des résultats qui ne sont que mirages. Restez vigilant face à ces promesses alléchantes et réfléchissez bien avant de vous engager financièrement. Engager son argent sur de simples illusions peut rapidement vous conduire dans une impasse.
Bankroll : astuces essentielles pour sécuriser vos finances
La gestion rigoureuse de votre capital constitue votre meilleure défense contre les pertes liées aux conseils de tipsters douteux. Établissez un budget strictement dédié aux paris et ne dépassez jamais les limites que vous vous êtes fixées.
Optimisation des stratégies de mise performantes
Pour protéger votre capital et naviguer sereinement dans le monde des paris, il est judicieux de miser seulement une petite partie de votre bankroll sur chaque pronostic. Cette stratégie permet non seulement de réduire l’impact des pertes inévitables mais aussi de garantir la pérennité de votre capital.
Adopter des méthodes comme celle de Kelly ou opter pour la mise plate peut faire toute la différence. En vous limitant à un faible pourcentage à chaque pari, vous évitez les risques inconsidérés et favorisez une gestion plus stable et réfléchie de vos ressources. Cette approche disciplinée est un allié précieux pour ceux qui souhaitent s’engager dans le long terme sans mettre en péril leur budget.
Multiplicité des canaux d’information fiables
Ne vous reposez jamais sur les conseils d’un seul tipster, même s’il est très respecté. Explorez diverses analyses et confrontez-les à votre propre recherche pour les matchs canadiens. Cela vous permettra de développer une compréhension plus fine et personnelle des pronostics.
Prenez le temps de plonger dans les détails du jeu. En examinant différents points de vue et en accumulant vos propres informations, vous construirez progressivement votre expertise. Cette démarche vous aidera à mieux évaluer la justesse des prédictions que vous recevez, tout en enrichissant votre connaissance du sport.
Plongée dans l’univers des tipsters canadiens et arnaques
S’entourer de tipsters fiables au Canada peut considérablement améliorer vos résultats aux paris sportifs, à condition de savoir distinguer les véritables experts des arnaqueurs. En restant vigilant face aux signes d’escroquerie, en vérifiant systématiquement les antécédents des pronostiqueurs, et en appliquant une gestion de bankroll rigoureuse, vous maximiserez vos chances de succès. Rappelez-vous que même les meilleurs tipsters connaissent des périodes difficiles et qu’aucun système ne garantit des gains constants.
Tableau récapitulatif
Aspect
Information clé
Croissance du marché des tipsters au Canada
Attrait accru pour les pronostiqueurs légitimes et les escrocs
Identification des tipsters fiables
Transparence et historique vérifiable de pronostics
Méthodologie des tipsters compétents
Analyses approfondies et conseils sur la gestion de bankroll
Questions Fréquemment Posées
Comment distinguer un bon tipster d’un escroc potentiel ?
Un bon tipster se caractérise par sa transparence, un historique vérifiable de ses pronostics, et une méthodologie claire.
Quelles ressources peuvent aider à évaluer la fiabilité d’un tipster ?
Consulter des revues spécialisées sur les bookmakers numériques et participer à des discussions sur les forums spécialisés canadiens sont d’excellentes ressources.
Pourquoi est-il important de comprendre la méthodologie d’un tipster ?
Cela permet d’instaurer la confiance, de suivre le processus intellectuel du tipster, et d’améliorer ses propres décisions de pari.
Le Raspberry Pi 5 avec 16 Go de RAM marque une avancée technologique majeure dans l’univers des micro-ordinateurs. Conçu pour repousser les limites, ce modèle offre une configuration hardware capable d’exécuter des tâches jusqu’ici réservées à des machines plus coûteuses et encombrantes. Face à l’évolution constante des besoins en calcul et en mémoire vive, cette nouvelle version permet aux passionnés, professionnels et développeurs de se lancer dans des projets exigeants sans compromis, tout en conservant la compacité caractéristique de la gamme Raspberry Pi.
Ce micro-ordinateur innovant, grâce à son processeur Quad-core ARM Cortex-A76 cadencé à 2,4 GHz, combiné à un GPU VideoCore VII performant et à une mémoire de 16 Go LPDDR4X, offre une puissance décuplée pour le traitement multitâche et les applications gourmandes. L’ajout d’une connectivité moderne avec des ports USB 3.0, une interface PCIe 2.0 et la prise en charge de deux sorties vidéo 4K à 60 ips fait du Raspberry Pi 5 un outil polyvalent capable de transformer l’approche du DIY et de l’informatique embarquée.
Au-delà de ses spécifications techniques, ce modèle est un pont vers de nouvelles utilisations professionnelles et domestiques, notamment dans les domaines de l’intelligence artificielle, la virtualisation et la gestion de serveurs réseau. L’accessibilité à un tel niveau de performance dans un format aussi compact bouleverse les codes de l’informatique légère et accroît les possibilités pour les makers, les enseignants et les chercheurs. Découverte approfondie de cet appareil qui redéfinit ce que peut être un micro-ordinateur performant en 2026.
Caractéristiques techniques du Raspberry Pi 5 avec 16 Go RAM : un concentré d’innovation
Le Raspberry Pi 5 en version 16 Go de RAM est bien plus qu’une simple évolution de son prédécesseur. Il s’appuie sur une nouvelle architecture matérielle qui apporte des gains significatifs en puissance et en fluidité pour répondre aux exigences des applications modernes. Le cœur de cette transformation réside dans son processeur Broadcom BCM2712, basé sur l’architecture ARM Cortex-A76, qui fonctionne à une fréquence élevée de 2,4 GHz.
Cette configuration quad-core offre jusqu’à trois fois plus de performance brute comparée au Raspberry Pi 4, supprimant les frustrations de lenteur lors de l’exécution de multiples tâches simultanées. La mémoire vive LPDDR4X de 16 Go est une exclusivité sur ce type de carte électronique, permettant de manipuler des charges lourdes telles que les simulations en intelligence artificielle ou l’analyse de données volumineuses. Le GPU intégré, le VideoCore VII, tourne à 800 MHz et prend en charge la sortie vers deux écrans 4K à 60 images par seconde, une avancée cruciale pour les projets multimédias ou de surveillance avancée.
Cette édition du Raspberry Pi 5 propose également une connectivité étendue : deux ports USB 3.0 assurent des transferts rapides, tandis que l’interface PCI Express 2.0 x1 ouvre la porte à une multitude de périphériques performants, comme des cartes d’extension réseau ou des modules SSD NVMe. L’intégration de la connectivité WiFi 6 et Bluetooth 5.0 place également cet appareil à la pointe des technologies sans fil, répondant aux exigences d’un usage professionnel récent ou d’un poste de travail domestique moderne.
Composant
Spécifications
Avantages
Processeur
Broadcom BCM2712 Quad-core ARM Cortex-A76 @ 2,4 GHz
Puissance multipliée par 3, exécution fluide des applications multitâches
Mémoire vive
16 Go LPDDR4X
Gestion performante des charges lourdes, multitâche intensif
GPU
VideoCore VII à 800 MHz
Support double écran 4K 60 Hz, performance graphique accrue
En résumé, ce Raspberry Pi 5 version 16 Go RAM est une plateforme matérielle aboutie, taillée pour des projets innovants sans précédent au sein de la communauté Raspberry Pi. Pour plus de détails techniques et pour approfondir ses capacités, vous pouvez consulter cette analyse complète qui décortique les tenants et aboutissants de cette avancée.
Raspberry Pi 5 16 Go RAM : un bond en avant dans la performance multitâche et l’informatique embarquée
La montée en mémoire vive apporte au Raspberry Pi 5 un potentiel remarquable pour gérer plusieurs processus simultanément, sans ralentissements ni interruptions. Ce saut technologique est particulièrement profitable pour les utilisateurs qui déploient des serveurs domestiques, des environnements de virtualisation, et des plateformes de développement complexes.
Par exemple, un développeur intéressé par l’apprentissage automatique pourra bénéficier pleinement des 16 Go de mémoire vive pour entraîner des modèles sur la carte elle-même sans nécessiter un PC dédié. De même, la gestion simultanée de conteneurs Docker devient moins contraignante, permettant le déploiement de services variés sur un seul appareil compact. L’amélioration du GPU VideoCore VII permet aussi d’exécuter des interfaces graphiques plus élaborées ou d’assurer la diffusion vidéo en haute définition sans perte de qualité.
Dans le secteur de l’informatique embarquée, la possibilité d’accéder à un port PCIe 2.0 étoffe considérablement les capacités d’extension. Cela permet par exemple d’utiliser des cartes spécifiques à des applications industrielles, ou d’ajouter un SSD NVMe pour le stockage ultra-rapide, améliorant la réactivité globale du système. Le Raspberry Pi 5 devient ainsi une plateforme polyvalente pour des usages allant de la domotique avancée, à des réseaux de capteurs, voire des consoles de jeu rétro avec émulation sophistiquée.
Exécution de machines virtuelles complexes facilitée par une mémoire abondante.
Virtualisation en laboratoire de test, avec des charges lourdes supportées aisément.
Serveurs multimédias performants, notamment pour la lecture fluide en streaming jusqu’à la 4K.
Applications d’intelligence artificielle embarquées grâce à la puissance du GPU et de la RAM.
Développement de logiciels et testing multiplateforme sur un seul appareil.
Le Raspberry Pi 5 16 Go est donc idéal pour quiconque souhaite exploiter un micro-ordinateur capable de délivrer une performance constante dans un contexte multitâche et professionnel. Pour découvrir comment l’utiliser dans des applications concrètes ou les possibilités qu’il offre dans différents secteurs, cet article spécialisé sera une excellente ressource.
Positionnement du Raspberry Pi 5 16 Go face à la concurrence et aux anciennes versions
Proposer 16 Go de mémoire vive sur une carte aussi compacte que le Raspberry Pi est une prouesse qui ne vient pas sans compromis, notamment en ce qui concerne le prix. Offert aux alentours de 120 dollars, ce modèle est sensiblement plus cher que les versions 8 Go ou 4 Go. Le coût supplémentaire s’explique par la mémoire embarquée plus généreuse et les performances accrue, mais il invite néanmoins à réfléchir à son rapport qualité-prix en fonction des besoins spécifiques.
Sur le plan technique, à part l’augmentation notable de la RAM, ce modèle ne marque pas une révolution majeure du hardware comparé au Raspberry Pi 5 standard, mais il s’adresse à un segment d’utilisateurs recherchant une puissance et une fluidité maximales. En comparaison avec des mini-PC x86 dans la même gamme de prix, le Raspberry Pi excelle par sa consommation énergétique réduite, sa taille minuscule et son écosystème logiciel particulièrement riche, bien que les alternatives x86 puissent offrir plus de stockage ou une compatibilité native avec Windows.
Cette décision stratégique de la Raspberry Pi Foundation s’inscrit dans une volonté de positionner ce mini-ordinateur comme une solution polyvalente, adaptable aussi bien à des projets éducatifs qu’industriels. Le Raspberry Pi 5 16 Go devient ainsi une passerelle vers un marché professionnel exigeant qui sollicitait auparavant l’usage de machines plus volumineuses.
Modèle
RAM
Prix approximatif
Usage conseillé
Points forts
Raspberry Pi 5 (16 Go)
16 Go LPDDR4X
120 $
Projets intensifs, serveurs, IA
Mémoire élevée, connectivité avancée
Raspberry Pi 5 (8 Go)
8 Go
80 $
Usage général, multitâche simple
Bon compromis puissance/prix
Mini PC x86 Intel N100
16 Go
120-140 $
Usage général, stockage local important
Compatibilité Windows, stockage NVMe
Pour mieux comprendre les nuances entre les options disponibles, il est judicieux de consulter des analyses spécialisées comme cette comparaison détaillée qui met en lumière les avantages du Raspberry Pi dans ce contexte dynamique.
https://www.youtube.com/watch?v=_KwRwWd6MSA
Conseils pratiques et limites pour une utilisation optimale du Raspberry Pi 5 16 Go
Utiliser pleinement un Raspberry Pi 5 avec 16 Go de RAM nécessite aussi de prendre en compte certains paramètres essentiels. La compatibilité logicielle est un premier point crucial : ce modèle ne supporte pas les versions plus anciennes de Raspberry Pi OS, ce qui oblige à adopter la dernière mouture nommée Rat de bibliothèque. Cette modernisation logicielle améliore la sécurité et les performances, mais peut engendrer des contraintes pour le matériel ou les applications plus anciennes.
La chaleur générée par cet équipement, plus élevée que ses prédécesseurs en raison des composants plus puissants, impose l’usage d’un boîtier spécifique avec ventilation active. Ce point est primordial pour éviter le throttling thermique qui dégrade les performances sur le long terme. Il est aussi recommandé d’utiliser une alimentation USB-C d’au moins 5V/5A afin de garantir une distribution électrique adaptée et éviter des coupures ou sous-performances.
Enfin, le Raspberry Pi 5 avec 16 Go RAM ne conserve pas les formats des coques antérieures, excluant ainsi la réutilisation des anciens boîtiers. Ces précautions ont été prises par la fondation pour offrir un produit robuste à la durée de vie accrue et capable d’accompagner les projets les plus innovants.
Installer la dernière version du système d’exploitation pour bénéficier pleinement des améliorations.
Utiliser un boîtier ventilé adapté à la dissipation thermique pour préserver la longévité.
Choisir une alimentation USB-C puissante pour stabiliser la distribution énergétique.
Anticiper l’incompatibilité avec les anciens accessoires pour éviter les surprises.
Veiller à la qualité des périphériques USB 3.0 pour exploiter au mieux la connectivité étendue.
Pour approfondir ces recommandations et comprendre les étapes optimales d’installation et de maintenance, ce guide pratique offre un excellent point de départ. Il aide à naviguer dans les subtilités techniques liées à ce modèle et à maximiser la durée de vie de votre investissement.
Applications idéales et utilisateurs cibles du Raspberry Pi 5 16 Go RAM
La puissance et la mémoire vive du Raspberry Pi 5 16 Go en font un outil adapté à une large palette d’utilisations sophistiquées dans l’écosystème technologique actuel. Les professionnels de la programmation et du développement logiciel peuvent automatiser la construction de prototypes complexes sans devoir investir dans plusieurs machines. De plus, le Raspberry Pi 5 supporte aisément le déploiement de serveurs dédiés, que ce soit pour des sites web à trafic modéré ou pour la gestion de réseaux domestiques avancés.
En particulier, l’intelligence artificielle prend une place majeure parmi les cas d’usage. Ce modèle permet d’exécuter des algorithmes d’apprentissage profond, de reconnaissance vocale ou de vision par ordinateur directement à partir du mini-ordinateur, ce que les versions précédentes ne rendaient pas possible de manière fluide. Cette capacité ouvre la porte à des projets de recherche ou à des applications industrielles dans des domaines où la performance mémoire est un goulot d’étranglement.
À l’inverse, les passionnés moins exigeants orienteront leurs choix vers des Raspberry Pi 4 ou 5 avec moins de mémoire, afin d’équilibrer budget et besoins. Le modèle 16 Go vise ainsi un public averti, exigeant et en quête de polyvalence maximale. Il se distingue aussi dans le domaine éducatif avancé, par exemple au sein des universités qui nécessitent pour leurs laboratoires des plateformes puissantes et efficaces dans un encombrement compact.
Développeurs logiciels en environnement multitâche intensif.
Ingénieurs IA pour prototypage et modélisation avancée.
Administrateurs réseau cherchant à centraliser plusieurs services.
Éducateurs et chercheurs pour les travaux pratiques exigeants.
Passionnés de domotique déployant des systèmes complexes multi-appareils.
En explorant les possibilités offertes par ce micro-ordinateur, vous pourrez envisager des projets innovants et performants à moindre coût, répondant aux exigences du marché technologique. Pour des idées de projets et d’usages, ce dossier sur les projets Raspberry Pi est à explorer.
Quels gains apporte la mémoire de 16 Go sur le Raspberry Pi 5 ?
La mémoire vive plus importante améliore le multitâche, permet de gérer des applications gourmandes en ressources comme l’IA ou la virtualisation, et facilite l’exécution de conteneurs Docker sans ralentissement.
Le Raspberry Pi 5 16 Go est-il adapté aux débutants ?
Ce modèle est surtout destiné à des utilisateurs avancés ou professionnels. Les novices peuvent privilégier des versions avec moins de RAM pour un meilleur équilibre entre coût et simplicité.
Peut-on utiliser les anciennes coques du Raspberry Pi sur le modèle 5 avec 16 Go ?
Non, le Raspberry Pi 5 16 Go nécessite un boîtier spécifique avec ventilation active en raison de ses composants plus puissants et de la dissipation thermique accrue.
Quelle alimentation choisir pour garantir la stabilité ?
Il est recommandé d’utiliser une alimentation USB-C capable de fournir au moins 5V/5A pour éviter les problèmes de sous-tension et garantir les performances optimales.
Le Raspberry Pi 5 16 Go peut-il remplacer un mini-PC classique ?
Selon les usages, il peut constituer une alternative efficace, notamment pour des tâches optimisées ARM et des projets légers à moyens, tout en offrant un encombrement réduit et une faible consommation.
À l’aube de 2026, le Raspberry Pi continue de séduire tant les amateurs que les professionnels grâce à son incroyable polyvalence et son prix abordable. Cependant, cette popularité grandissante s’accompagne d’un choix de systèmes d’exploitation toujours plus vaste, adapté à une multitude d’usages allant des projets éducatifs aux applications industrielles. Ce dilemme autour du choix OS est fondamental pour exploiter au maximum le potentiel de cet ordinateur monocarte. En effet, l’optimisation de la compatibilité, des performances et de la sécurité repose en grande partie sur la décision prise à ce niveau.
De la facilité d’utilisation d’un système comme Raspberry Pi OS à la puissance brute et la modularité d’Arch Linux, chaque OS apporte ses propres atouts mais aussi contraintes. Par ailleurs, la multiplication des mises à jour et la variété des distributions Linux disponibles rendent d’autant plus complexe une sélection éclairée. Ce panorama en 2026 s’enrichit également d’options dédiées au multimédia, à l’IoT, au gaming rétro, ou encore à la création de serveurs NAS, renforçant l’impression d’un univers en perpétuelle expansion pour ce mini-ordinateur.
Dans ce contexte, discerner le système d’exploitation qui correspond à vos besoins, tout en gardant à l’esprit la simplicité d’installation, la maintenance et le support communautaire, est plus que jamais essentiel. Sans oublier la sécurité, un critère devenu incontournable face à des usages souvent connectés et sensibles. L’objectif ici est donc de vous guider dans ce choix stratégique, en tenant compte non seulement des fonctionnalités, mais aussi des performances actuelles des OS compatibles Raspberry Pi.
Ce guide explicite ainsi les avantages spécifiques de chacun, propose des exemples concrets de projets adaptés, et apporte des clés pour optimiser la mise à jour et la configuration des systèmes d’exploitation. Que vous soyez passionné débutant ou expert cherchant la meilleure distribution Linux pour un projet de domotique ou de réalisation d’un centre multimédia, vous découvrirez ici une analyse fine des options disponibles aujourd’hui. Ce faisant, vous serez prêt à maximiser la valeur de votre Raspberry Pi dès le premier démarrage.
En bref :
Choix OS adapté au projet : chaque système d’exploitation propose des fonctionnalités ciblées, du jeu rétro au serveur NAS, en passant par l’IoT et le multimédia.
Performance et sécurité : des distributions optimisées sont essentielles pour assurer réactivité et protection du Raspberry Pi dans ses usages quotidiens.
Compatibilité matérielle : certains OS sont spécifiquement calibrés pour les nouveaux modèles ou équipés de fonctions avancées pour exploiter pleinement le matériel.
Facilité d’utilisation et mise à jour : la maintenance et le support communautaire sont des facteurs clés pour les utilisateurs novices et confirmés.
Écosystème Linux en plein essor : la variété des distributions permet une personnalisation poussée, mais complexifie aussi le choix pour un profil utilisateur donné.
Les meilleurs systèmes d’exploitation Linux pour Raspberry Pi en 2026 : comparaison approfondie
À l’heure actuelle, le paysage des systèmes d’exploitation dédiés au Raspberry Pi est dominé par plusieurs distributions Linux parfaitement adaptées aux contraintes et aux spécificités techniques du mini-ordinateur. Parmi celles-ci, Raspberry Pi OS reste la référence incontournable. Basé sur Debian, il bénéficie d’une excellente stabilité et d’une adaptation parfaite au matériel, assurant un équilibre idéal entre performance et simplicité.
Cependant, d’autres alternatives comme Ubuntu MATE ou Manjaro ARM gagnent en popularité, en particulier auprès des utilisateurs recherchant une interface plus moderne ou des fonctionnalités spécifiques. Ubuntu MATE se distingue par son interface conviviale et son large catalogue logiciel, ce qui en fait un système adapté à un usage de bureau classique. Quant à Manjaro ARM, il incarne l’essence d’Arch Linux en proposant un système plus léger et personnalisable, réservé à ceux qui ont une certaine maîtrise de Linux.
Le tableau ci-dessous synthétise quelques caractéristiques clés des distributions les plus usitées en 2026 sur Raspberry Pi :
Système d’exploitation
Avantages principaux
Utilisateurs cibles
Mise à jour & maintenance
Compatibilité matérielle
Raspberry Pi OS
Stabilité, support officiel, communauté large
Débutants et usage général
Fréquentes et automatisées
Tous modèles actuels
Ubuntu MATE
Interface moderne, large dépôt logiciel
Utilisateurs recherchant confort et applications variées
Soutien sur 5 ans (LTS)
Modèles 64-bit récents
Manjaro ARM
Léger, personnalisable, Rolling Release
Utilisateurs avancés
Continue via Rolling Release
Raspberry Pi 4 et 5
RetroPie
Spécialisé émulation jeux rétro
Gamers et développeurs d’émulateurs
Mises à jour régulières
Modèles Pi 3 et supérieurs
OpenMediaVault
Serveur NAS complet, flexible
Utilisateurs avancés et professionnels
Mises à jour ponctuelles
Pi 3 et 4
Au fur et à mesure que les mises à jour apportent des corrections et améliorations, il est crucial de s’appuyer sur des distributions disposant d’un système fiable de mise à jour, garantissant à la fois performance et sécurité. Cela implique notamment un monitoring régulier des sources officielles et l’usage d’outils automatisés pour maintenir le système à jour.
Pour approfondir l’installation et les spécificités techniques de ces OS, le site les meilleurs systèmes d’exploitation pour Raspberry Pi offre une ressource précieuse, détaillant les étapes et astuces pour optimiser leur déploiement.
Optimiser la performance et la sécurité des systèmes d’exploitation pour Raspberry Pi
Un des critères les plus déterminants lors du choix d’un système d’exploitation pour Raspberry Pi en 2026 concerne la performance, intimement liée à la capacité d’exploitation du matériel. Les modèles récents du Raspberry Pi pouvant embarquer jusqu’à 8 Go de RAM ou plus nécessitent des OS capables de gérer efficacement ces ressources afin d’éviter toute latence ou ralentissement.
Raspberry Pi OS, grâce à une optimisation native, propose ainsi une interface fluide même sur des modèles moins puissants. Pour des usages plus exigeants, comme la création d’un centre multimédia avec OSMC ou LibreELEC, la priorisation des ressources vers la lecture vidéo 4K et audio HD devient essentielle. La performance repose donc aussi sur la configuration personnalisée possible avec certains systèmes, permettant d’allouer les ressources aux processus critiques.
Sur le plan de la sécurité, la mise à jour régulière des systèmes d’exploitation est la pierre angulaire pour minimiser les risques d’attaques ou d’intrusions. Les OS comme Ubuntu Core ou balenaOS sont très prisés pour des projets IoT sécurisés, proposant des patchs fréquents et des mécanismes intégrés de confinement des applications. Un autre élément à surveiller est la gestion des accès et la compatibilité avec les outils de sécurité Linux populaires.
Une bonne pratique consiste à utiliser des outils d’automatisation des mises à jour et des sauvegardes régulières, ce qui permet de maintenir à jour l’OS sans temps d’indisponibilité. Pour vous accompagner dans ces démarches, le guide pratique de l’installation du système d’exploitation Raspberry Pi détaillera les méthodes les plus sûres et efficaces pour garantir une configuration optimale.
Liste : Conseils pour maximiser la performance et la sécurité de votre Raspberry Pi
Choisir un OS adapté à la puissance de votre Raspberry Pi pour éviter la surcharge des ressources.
Effectuer des mises à jour régulières via des outils automatisés comme apt ou snap.
Configurer des sauvegardes automatiques pour prévenir toute perte de données importantes.
Limiter les services non essentiels pour réduire la surface d’attaque et maximiser la vitesse.
Utiliser des pare-feu et outils de contrôle d’accès compatibles avec le système Linux sélectionné.
Installer les logiciels uniquement depuis des sources fiables pour éviter l’introduction de malwares.
Les systèmes d’exploitation dédiés aux usages spécifiques : multimédia, gaming et IoT
En 2026, le Raspberry Pi a su affiner ses usages spécialisés grâce à une sélection de systèmes d’exploitation conçus pour des fonctions distinctes. Par exemple, LibreELEC et OSMC dominent le marché du multimédia, transformant la carte en un véritable centre de divertissement. Ils permettent la lecture fluide de contenus vidéo 4K, le décodage HEVC et l’audio haute définition en exploitant pleinement les capacités matérielles.
Dans le domaine du gaming rétro, RetroPie demeure la plateforme idéale. En intégrant plusieurs frameworks d’émulation, elle donne accès à une vaste bibliothèque de consoles classiques, avec une compatibilité optimale pour divers contrôleurs. Ces systèmes privilégient une interface intuitive, facilitant l’accès aux jeux sans nécessiter de compétences avancées.
Pour les projets IoT, comme les domotiques ou la gestion d’objets connectés, des solutions comme balenaOS ou Ubuntu Core apportent une architecture sécurisée avec des mises à jour fréquentes et un système de confinement des applications. Cette orientation se traduit par une meilleure gestion des ressources réseau et une intégration facilitée avec des écosystèmes cloud et des protocoles sécurisés, éléments essentiels à la maintenance à distance.
Les passionnés souhaitant s’immerger dans ces usages techniques trouveront dans ces OS une base robuste, permettant de personnaliser l’expérience tout en bénéficient d’un support technique et communautaire constant.
https://www.youtube.com/watch?v=oSktyZb8O44
Facilité d’utilisation et support communautaire : aspects décisifs dans le choix d’un OS Raspberry Pi
L’un des piliers du succès des systèmes d’exploitation pour Raspberry Pi réside dans leur simplicité d’utilisation, surtout pour les débutants. Raspberry Pi OS a su conquérir une large part des utilisateurs grâce à une interface graphique intuitive, une documentation riche ainsi qu’un écosystème complet d’outils pédagogiques. Son installation via NOOBS ou Raspberry Pi Imager est particulièrement accessible, ce qui encourage une prise en main rapide.
Cependant, d’autres distributions comme Ubuntu MATE ou Manjaro apportent une ergonomie soignée et une compatibilité logicielle étendue, plus proche d’un environnement PC classique. Cette familiarité aide ainsi les utilisateurs souhaitant exploiter le Raspberry Pi comme un véritable ordinateur de bureau.
Le support communautaire joue également un rôle central. Les forums, tutoriels et guides en ligne permettent souvent de résoudre rapidement les problèmes rencontrés. À ce titre, les plateformes francophones telles que le guide système d’exploitation Raspberry Pi sont des ressources indispensables pour accompagner les utilisateurs dans leur parcours et faciliter la persévérance face aux premières difficultés.
Pour les utilisateurs plus avancés, certaines distributions ouvrent la porte à une personnalisation fine, par exemple via l’utilisation de la ligne de commande et le paramétrage de scripts, ouvrant ainsi des horizons étendus en termes d’escalade des compétences.
Adapter le système d’exploitation Raspberry Pi à votre projet en 2026 : un exemple pratique
Imaginons le cas d’un passionné de domotique désireux de créer une installation intelligente à domicile. Après avoir étudié les besoins fonctionnels et techniques, il se tourne vers une distribution légère, sécurisée et à jour. Dans ce contexte, Raspberry Pi OS Lite combiné à Home Assistant représente une solution idéale alliant simplicité et puissance.
La facilité d’installation, la gestion des mises à jour et la compatibilité avec de nombreux capteurs et protocoles IoT permettent un déploiement fluide. La sécurité, assurée par un système Linux robuste et des conseils spécifiques sur les points d’accès réseau, garantit la tranquillité d’usage à long terme.
Pour configurer un NAS personnel, OpenMediaVault s’impose comme un OS parfaitement taillé pour cet usage, bien que nécessitant une certaine courbe d’apprentissage. Sa modularité offre un contrôle approfondi sur le partage de fichiers, les sauvegardes et la gestion des droits utilisateurs, faisant du Raspberry Pi un serveur fiable et efficace à moindre coût.
Débuter avec un pied dans le monde du gaming rétro ? RetroPie et Lakka proposent des chemins très accessibles, spécialisés dans leurs interfaces utilisateur et dans la gestion des manettes, réduisant le temps nécessaire à la mise en fonction.
Cette diversité de choix répond ainsi aux attentes variées rencontrées en 2026, illustrant la richesse de l’écosystème ApplePi. En amont, pour vous aider à mieux comprendre ces options, découvrez nos conseils pratiques pour installer un système d’exploitation sur Raspberry Pi et tirer parti des spécificités de chacun.
Quel OS choisir pour un débutant sur Raspberry Pi ?
Raspberry Pi OS est recommandé pour sa simplicité, son optimisation native, et sa large communauté qui facilite la prise en main et la résolution des problèmes.
Puis-je utiliser un Raspberry Pi comme serveur multimédia ?
Oui, avec des OS comme LibreELEC ou OSMC, votre Raspberry Pi peut devenir un centre multimédia performant, capable de gérer la lecture 4K et l’audio HD.
Comment garantir la sécurité de mon Raspberry Pi ?
Il est essentiel de maintenir votre système à jour, d’utiliser des pare-feu et de limiter les services pour réduire les vulnérabilités. Les distributions IoT comme Ubuntu Core intègrent aussi des mesures de sécurité avancées.
Quelle distribution pour faire du gaming rétro ?
RetroPie et Lakka sont les options privilégiées, offrant une interface dédiée et une compatibilité avec la majorité des consoles classiques et manettes modernes.
Est-il difficile d’installer un système d’exploitation sur Raspberry Pi ?
L’utilisation d’outils comme Raspberry Pi Imager ou NOOBS simplifie considérablement l’installation, même pour les utilisateurs sans expérience technique.
Derrière Macé Robotics, Nicolas mêle réparation électronique au composant et conception de cartes pour des besoins professionnels, tout en développant des robots mobiles pour l’éducation et la recherche. On trouve notamment des projets de robots basés sur Raspberry Pi et Raspberry Pi Pico (MRPi1, MR-Pico), accompagnés de contenus et documentations. Dans ce contexte, il organise […]
Dans un monde où la technologie ne cesse de repousser les limites de l’innovation, le robot Neo s’impose comme une véritable révolution dans le domaine de l’animation et de l’accueil. Cet humanoïde de nouvelle génération combine intelligence artificielle avancée, design élégant et capacités d’interaction exceptionnelles pour créer des expériences mémorables.
Un Concentré de Technologie au Service de l’Humain
Neo n’est pas un simple gadget robotique. C’est une plateforme technologique sophistiquée conçue pour interagir naturellement avec les humains. Doté d’une intelligence artificielle de pointe, ce robot humanoïde peut reconnaître les visages, comprendre les émotions et adapter ses réponses en fonction du contexte et de son interlocuteur.
Ses capacités incluent :
Reconnaissance vocale multilingue : Neo comprend et parle plusieurs langues, facilitant la communication avec un public international
Mouvements fluides et naturels : Grâce à ses articulations avancées, Neo reproduit des gestes humains avec une précision remarquable
Interaction tactile : Son écran tactile intégré permet des échanges interactifs et ludiques
Programmation personnalisable : Chaque intervention peut être adaptée aux besoins spécifiques de l’événement
Des Applications Multiples pour Tous Types d’Événements
La polyvalence de Neo en fait un allié précieux pour une multitude d’occasions. Que ce soit pour un salon professionnel, un lancement de produit, une conférence ou une animation commerciale, ce robot humanoïde apporte une dimension innovante et mémorable.
Dans le cadre d’événements corporate, Neo peut assurer l’accueil des visiteurs, fournir des informations sur les stands, guider les participants ou même animer des présentations. Son apparence futuriste et ses capacités interactives attirent naturellement l’attention et génèrent un fort engagement du public.
Pour les animations commerciales, Neo devient un véritable ambassadeur de marque. Il peut présenter des produits, répondre aux questions des clients et créer une expérience client unique qui se démarque de la concurrence.
L’Avantage de la Location pour une Flexibilité Maximale
Investir dans un robot humanoïde représente un budget conséquent que toutes les entreprises ne peuvent ou ne souhaitent pas engager. C’est pourquoi la location robot Neo constitue une solution idéale pour bénéficier de cette technologie de pointe sans contrainte financière excessive.
La location offre plusieurs avantages stratégiques. Elle permet de tester l’impact de Neo sur votre public avant un éventuel investissement plus important. Elle garantit également l’accès aux dernières mises à jour technologiques et logicielles, car les robots en location sont constamment maintenus et optimisés par les prestataires.
De plus, cette formule apporte une grande flexibilité : vous pouvez utiliser Neo pour des événements ponctuels sans vous préoccuper du stockage, de la maintenance ou de l’obsolescence technologique.
Un Retour sur Investissement Mesurable
Au-delà de l’effet “waouh” indéniable, Neo génère des résultats concrets et mesurables. Les événements intégrant ce robot humanoïde constatent généralement :
Une augmentation significative du trafic sur les stands ou espaces d’animation
Un temps d’engagement prolongé des visiteurs
Une amélioration de la mémorisation de la marque
Une couverture médiatique et sociale accrue grâce au caractère viral de l’animation
Les participants photographient et partagent massivement leurs interactions avec Neo sur les réseaux sociaux, générant ainsi une visibilité organique précieuse pour votre marque.
L’Avenir de l’Animation est Déjà Là
Neo représente bien plus qu’une simple tendance technologique. Il incarne l’avenir de l’animation événementielle, où l’humain et la machine collaborent pour créer des expériences enrichissantes et mémorables.
À une époque où capter l’attention du public devient de plus en plus difficile, Neo offre cette différenciation décisive qui transforme un événement ordinaire en une expérience extraordinaire. Son mélange unique de technologie avancée et de design accessible en fait le compagnon idéal pour tous ceux qui souhaitent marquer les esprits et se démarquer dans un environnement concurrentiel.
Que vous organisiez un salon professionnel, une journée portes ouvertes, un anniversaire d’entreprise ou tout autre événement nécessitant une animation innovante, Neo saura apporter cette touche de modernité et d’interactivité qui fera toute la différence.
L’ère des robots humanoïdes accessibles est arrivée. Neo en est la preuve vivante, prêt à transformer votre prochain événement en une expérience inoubliable.
Le stockage en réseau devient un enjeu crucial tant pour les particuliers que pour les petites entreprises. Avec la multiplication des appareils connectés et la nécessité de centraliser les données, disposer d’un serveur NAS (Network Attached Storage) performant et accessible est plus que jamais essentiel. S’appuyer sur un Raspberry Pi pour cette tâche offre une alternative économique, flexible et personnalisable à l’achat d’appareils NAS commerciaux souvent onéreux. En 2026, cette solution DIY se démocratise grâce à la montée en puissance du Raspberry Pi 5, qui apporte un gain de puissance significatif permettant de tirer pleinement parti des fonctionnalités NAS modernes. De plus, la communauté active autour de ce micro-ordinateur ne cesse de proposer des outils et tutoriels facilitant la mise en place d’un NAS, même pour les utilisateurs novices.
Ce guide se veut une ressource complète pour comprendre pourquoi choisir un Raspberry Pi comme base de NAS, quels matériels privilégier, comment configurer efficacement son serveur de fichiers en réseau local, et enfin comment optimiser la sécurité et la gestion des sauvegardes. L’objectif est de rendre accessible le processus de création d’un stockage réseau personnel pour garantir une accessibilité fiable, simple et sécurisée aux données, depuis tous vos appareils domestiques ou professionnels. Que vous soyez un passionné de la technologie recherchant un projet technique ou un utilisateur souhaitant contrôler ses données, ce guide vous aidera à réussir la configuration de votre NAS avec un Raspberry Pi facilement.
En bref :
Économie et performance : Utiliser un Raspberry Pi 5 permet un NAS puissant à une fraction du coût des solutions commerciales.
Flexibilité : Le système est entièrement personnalisable avec des logiciels comme Samba ou OpenMediaVault.
Matériel essentiel : Un Raspberry Pi récent, un disque dur externe ou SSD, et une bonne connexion réseau suffisent.
Sécurité : Gestion des utilisateurs Samba, mots de passe forts, mises à jour régulières et options VPN assurent la protection des données.
Accessibilité : Accès aux fichiers via le réseau local depuis n’importe quel appareil, avec possibilité d’intégrer des fonctionnalités avancées comme le streaming multimédia.
Les avantages majeurs de choisir un Raspberry Pi pour votre NAS facile
Le Raspberry Pi, micro-ordinateur créé initialement pour l’éducation, s’est imposé comme un outil incontournable pour les passionnés de technologie et l’informatique domestique. Lorsque l’on considère la construction d’un NAS, le Raspberry Pi présente des avantages spécifiques qui justifient pleinement son adoption.
Premièrement, l’aspect économique attire l’attention. Un NAS commercial dédié peut coûter de plusieurs centaines à plus de mille euros selon les fonctionnalités et la capacité de stockage. À l’inverse, un Raspberry Pi 5, qui offre une puissance multipliée par rapport à ses prédécesseurs, se trouve autour de 100 euros. Lorsque l’on ajoute un disque dur externe ou un SSD, l’ensemble reste abordable par rapport aux solutions standards. Cette flexibilité de coût permet même de démarrer avec un modèle réduit et d’agrandir la capacité progressivement sans renouveler tout le système.
Ensuite, la faible consommation énergétique du Raspberry Pi est un atout essentiel. Le NAS peut tourner quotidiennement, 24 heures sur 24, sans engendrer des factures d’électricité élevées. Ceci est particulièrement apprécié dans un contexte domestique, où le serveur tourne souvent en continu. Le Pi consomme généralement moins de 10 W, alors que les NAS commerciaux peuvent dépasser 30 W en fonctionnement intensif.
La flexibilité logicielle est un autre point fort. Contrairement aux systèmes fermés, le Raspberry Pi permet d’installer divers systèmes d’exploitation adaptés à la gestion du stockage réseau. OpenMediaVault est très populaire grâce à son interface web simple, tandis que Samba permet un partage efficace sur les réseaux Windows et macOS. Vous pouvez même combiner ces solutions avec des conteneurs Docker pour ajouter des fonctions multimédia via Plex ou Kodi, élargissant ainsi les possibilités de votre serveur de fichiers.
Enfin, le large support communautaire garantit un accompagnement efficace. Que ce soit via des forums spécialisés, des tutoriels détaillés comme sur Korben ou des plateformes dédiées, chaque étape de la configuration dispose de ressources accessibles et mises à jour, ce qui est rassurant, surtout pour les débutants.
Cependant, le Raspberry Pi n’est pas sans limites. Si vous manipulez d’énormes volumes de données en continu ou pour des utilisations professionnelles très exigeantes, ses performances peuvent s’avérer insuffisantes par rapport aux serveurs NAS spécialisés, notamment en termes de vitesse d’écriture et de gestion RAID avancée. De même, le stockage dépendra obligatoirement de périphériques externes, puisque le Pi dispose d’un espace interne très limité. Malgré cela, pour un usage domestique, ces contraintes sont souvent compensées par la modularité et le prix.
Matériel et logiciels indispensables pour une configuration NAS réussie sur Raspberry Pi 5
La réussite d’une configuration NAS avec un Raspberry Pi dépend largement du matériel choisi et du logiciel installé. Voici un tour d’horizon complet de ce dont vous aurez besoin.
Choix du Raspberry Pi 5 et périphériques de stockage
Pour un NAS efficace, le modèle recommandé est sans conteste le Raspberry Pi 5. Avec son processeur quad-core ARM76 64 bits cadencé à 2,4 GHz, il offre une puissance accrue, notamment en gestion multitâche et débit réseau grâce à son Ethernet 2,5 Gb/s. Ces fonctionnalités sont indispensables pour un serveur de fichiers fluide.
Côté stockage, le Raspberry Pi ne disposant pas de capacité interne évolutive, les disques durs ou SSD externes sont nécessaires. Un disque dur traditionnel est suffisant pour un usage basique, mais pour améliorer les performances de lecture/écriture, privilégiez un SSD. Le choix entre USB 3.0 et NVMe (via une carte adaptatrice spécifique) dépend du budget et du niveau d’exigence. Par exemple, la carte périphérique NVMe Geekworm X1004 permet d’insérer deux SSD M.2 sur le Raspberry Pi 5, ce qui optimise largement les débits et la fiabilité comparé à un simple disque USB.
Accessoires essentiels pour une installation propre et stable
Un bon boîtier avec refroidissement actif est conseillé pour éviter la surchauffe, surtout si votre NAS tourne en continu. Le boîtier GeeekPi en aluminium est un choix populaire et économique, tout en assurant un look soigné.
La connexion réseau est critique pour garantir un stockage réseau performant : optez pour un câble Ethernet catégorie 6 ou mieux, et fixez une adresse IP statique au Raspberry Pi via la configuration du routeur. Une alimentation fiable et stable complète le triptyque indispensable pour une configuration NAS réussie, évitant ainsi les déconnexions ou instabilités.
Logiciels pour transformer votre Raspberry Pi 5 en NAS
Le système d’exploitation officiel Raspberry Pi OS (32-bit) est un excellent point de départ. Ensuite, installez Samba pour gérer le partage de fichiers compatible avec Windows, macOS et Linux. Alternativement, OpenMediaVault offre une interface graphique conviviale pour gérer les volumes, les utilisateurs et les sauvegardes sans passer par la ligne de commande.
Voici un tableau récapitulatif des composants avec des exemples courants et coûts approximatifs :
Composants
Modèles recommandés
Prix approximatif (en euros)
Fonctionnalités clés
Micro-ordinateur
Raspberry Pi 5 8 Go RAM
~105 €
Processeur quad-core 2,4 GHz, Ethernet 2,5 Gb/s
Disque dur externe / SSD
SSD NVMe M.2 avec adaptateur Geekworm X1004
150 € à 300 € selon capacité
Débits rapides, stockage fiable
Boîtier
GeeekPi Aluminium avec ventilateur
~25 €
Refroidissement efficace, protection matérielle
Câble Ethernet
CAT6 ou CAT7
10 € à 20 €
Connexion stable et rapide en réseau local
Alimentation 5V 3A
Officielle ou compatible
~15 €
Stabilité énergétique essentielle
Le matériel adéquat s’accompagne d’une configuration soignée pour profiter pleinement des capacités de votre NAS DIY. Pour approfondir le sujet, consultez le guide complet sur Raspberry Pi France.
Étapes détaillées pour configurer votre NAS Raspberry Pi avec Samba facilement
Transformer un Raspberry Pi en NAS opérationnel passe par une série d’étapes précises. Voici la procédure détaillée, accessible même aux utilisateurs peu expérimentés.
Installation et préparation du système
Commencez par télécharger Raspberry Pi Imager, un utilitaire officiel qui facilite la gravure de l’image système sur la carte microSD. Choisissez Raspberry Pi OS (32-bit) pour bénéficier d’une base stable et compatible. Lors de la configuration initiale, attribuez un nom d’hôte clair comme « nas », créez un utilisateur sécurisé et activez le SSH pour la gestion à distance. Configurez aussi la connexion WiFi ou branchez un câble Ethernet pour garantir une connexion immédiate au réseau local.
Connexion et préparation du disque dur
Branchez votre disque dur externe ou SSD directement au Raspberry Pi. Connectez-vous ensuite via SSH au Raspberry Pi pour éviter d’utiliser un clavier et un écran dédiés. Identifiez le périphérique disque grâce à la commande « lsblk ». Utilisez l’outil de partitionning « fdisk » pour créer une nouvelle partition si nécessaire, puis formatez-la en ext4, un système de fichiers performant et compatible Linux qui supporte les permissions sécurisées.
Montez la partition et configurez son montage automatique dans le fichier « /etc/fstab » via une ligne adaptée qui évite les erreurs au démarrage. Par exemple :
Installez Samba avec la commande « sudo apt install samba samba-common-bin ». Puis, modifiez le fichier de configuration situé dans « /etc/samba/smb.conf » pour ajouter votre dossier partagé :
[shared]
path = /mnt/nas_storage
writeable = Yes
create mask = 0777
directory mask = 0777
public = no
Redémarrez le service Samba avec « sudo systemctl restart smbd » pour appliquer ces changements. Créez ensuite un utilisateur Samba dédié avec « sudo smbpasswd -a pinas » et définissez un mot de passe robuste. Ce compte permettra une authentification sécurisée lors de l’accès aux fichiers depuis un autre appareil.
Accès au NAS depuis d’autres appareils du réseau local
Depuis un PC Windows, ouvrez l’Explorateur de fichiers, cliquez sur « Connecter un lecteur réseau », puis entrez le chemin réseau du NAS sous la forme « nasshared ». Utilisez votre nom d’utilisateur Samba et mot de passe. Vous pouvez aussi accéder au NAS depuis macOS, Android ou Linux, garantissant une compatibilité universelle.
Cette procédure détaillée vous donne les clés pour déployer un NAS performant. Si vous souhaitez un tutoriel complété par vidéos et conseils avancés, le blog de GentilGeek propose des ressources très utiles.
Problèmes fréquents et solutions pratiques pour un NAS avec Raspberry Pi stable et rapide
Bien que la configuration soit relativement simple, certains obstacles peuvent survenir lors de l’utilisation d’un Raspberry Pi en NAS. Identifier ces points et adapter les solutions est essentiel pour maintenir un système stable et performant.
Améliorer les performances du serveur de fichiers
Le recours à un disque SSD plutôt qu’à un disque dur classique augmente considérablement les taux de transfert de fichiers. Le SSD élimine aussi les bruits mécaniques et réduit les risques de panne. Pour un réseau stable, préférez une connexion Ethernet câblée plutôt que WiFi, surtout si vous gérez des transferts importants de données.
L’optimisation du fichier smb.conf permet également d’améliorer les performances. Par exemple, en ajustant les paramètres de cache ou le nombre maximum de connexions simultanées, on peut éviter les ralentissements sous forte charge. Des réglages avancés consistent à utiliser des scripts pour monitorer la charge du système en temps réel.
Renforcer la sécurité et les accès contrôlés
Pour protéger les données, veillez à maintenir le système à jour, en appliquant régulièrement les correctifs de sécurité via la commande « sudo apt update && sudo apt upgrade ». Limitez l’accès SSH avec des clés publiques et désactivez l’accès root direct. Installez un pare-feu simple comme UFW, et pour des accès distants, configurez un VPN afin d’éviter toute exposition directe à Internet.
Automatiser les sauvegardes efficacement
L’utilisation des outils comme rsync facilite la sauvegarde automatique de dossiers critiques. Couplé à cron, vous pouvez programmer des sauvegardes nocturnes, avec une commande telle que :
Cette méthode assure que vos données importantes sont enregistrées régulièrement sans intervention manuelle.
Pour venir en aide lors de difficultés ou approfondir la gestion technique, le site Cyber Institut propose un guide complet approfondi.
https://www.youtube.com/watch?v=JquCsDFNSMU
Personnalisation avancée et intégrations complémentaires pour booster votre NAS Raspberry Pi
Une fois la base de votre NAS opérationnelle, vous pouvez penser à l’enrichir de fonctionnalités complémentaires pour étendre son utilité.
Streaming multimédia et serveur Plex
En intégrant Plex Media Server via Docker sur votre NAS, vous transformez votre espace de stockage en véritable médiathèque. Ceci vous permet de diffuser vos vidéos, musiques et photos sur n’importe quel appareil compatible, en toute fluidité. Le Raspberry Pi 5, grâce à sa puissance accrue, peut gérer ce type de tâches multimédia mieux que ses prédécesseurs.
Automatisation avec Docker et scripts personnalisés
Docker est un outil précieux qui vous permet d’exécuter plusieurs services isolés sur votre NAS, sans impact négatif sur la stabilité. Que ce soit pour ajouter un serveur web, un cloud personnel comme Nextcloud, ou des services de sauvegarde automatisée, Docker facilite la gestion et la mise à jour des applications.
Organisation et accès à distance
Pour garantir une utilisation optimale, structurez vos fichiers avec des arborescences claires et nommage cohérent. L’ajout d’un VPN sécurisé vous permet également d’accéder à votre NAS depuis l’extérieur de votre réseau local sans compromettre la sécurité.
Ces méthodes avancées sont parfaitement détaillées dans les ressources de Tech4Free, un incontournable pour maîtriser son système de stockage réseau évolutif.
Le Raspberry Pi 5 est-il vraiment adapté pour un NAS ?
Oui, le Raspberry Pi 5 offre une puissance accrue avec un processeur plus rapide et un Ethernet 2,5 Gb/s, ce qui le rend tout à fait apte à gérer un serveur de fichiers performant pour un usage domestique et semi-professionnel.
Pourquoi choisir Samba pour le partage des fichiers ?
Samba est compatible avec la majorité des systèmes d’exploitation (Windows, macOS, Linux) et facile à configurer, ce qui en fait l’outil de référence pour partager des fichiers sur un réseau local avec un Raspberry Pi.
Comment sécuriser l’accès à mon Raspberry Pi NAS ?
Mettez à jour régulièrement l’OS et les logiciels, utilisez des mots de passe forts, limitez les accès SSH, installez un pare-feu, et configurez un VPN pour l’accès distant.
Puis-je automatiser les sauvegardes sur mon NAS Raspberry Pi ?
Absolument, avec des outils comme rsync et cron, vous pouvez planifier des sauvegardes régulières sans intervention manuelle, assurant ainsi la protection de vos données.
Peut-on ajouter des fonctionnalités multimédia à un NAS Raspberry Pi ?
Oui, grâce à des logiciels comme Plex via Docker, votre NAS peut servir de serveur multimédia pour diffuser vos contenus sur divers appareils.
Par le passé, Internet a bouleversé de nombreux métiers qui n'y ont pas résisté. S'il ne fallait en citer qu'un seul ce serait la vente en boutique spécialisée ! Mais bien d'autres en ont souffert.
Aujourd'hui, l'IA bouleverse à nouveau ces métiers qui ont survécu... mais il impacte aussi les métiers créés par Internet.
Source image: www.bbschool.fr
Voici notre retour d'expérience sur le sujet. Comment une option de recherche et les LLMs ont finalement eux raisons de nous malgré notre enthousiasme.
Il ne reste plus qu'a se ré-inventer...
2015 – Naissance du métier
Il y a une décennie à peine, le monde des Makers devenait populaire. L’idée de hacker des appareils existants pour les améliorer ou corriger des manquements manifestes commençait à faire son chemin. Notre monde était déjà fort numérisé, peuplé d’appareils électroniques et de microcontrôleurs. L’obsolescence programmée et le droit à réparer occupaient le devant de la scène.
S’il existait nombre d’électroniciens, il y avait relativement peu de ressources et de matériel pour l’apprenti Maker. Certes Arduino et son écosystème était omniprésent, mais il manquait surtout de ressources en Français. Des ressources pour faciliter l’intégration des nouveaux venus dans le monde des Makers.
Ainsi est né le "Business Model" de MCHobby en commençant par la traduction du Kit d’exploration ARDX pour Arduino. Ainsi, il existait pour la première fois un kit d’apprentissage avec une documentation en Français accessible et en Open-Source (disponible gratuitement sur le wiki).
Une popularité grandissante
Durant des années, MCHobby a alimenté un WebShop avec des produits électroniques pour maker correctement traduit en Français et souvent accompagnés de fiches tutoriels en Français. Ces créations, vulgarisation et traductions furent également l’occasion d’un apprentissage continu pour nous.
Les traductions Google dans les domaines pointus étaient, à l’époque, trop imprécises ou parfois totalement incompréhensibles.
Le business model
L’idée est simple. Les utilisateurs font des recherches dans les domaines Makers. Pour ce qui est du hacking électronique et des projets associés, les moteurs de recherche font ressortir le WebShop ou le Wiki ou le Blog de MCHobby. L'abondante documentation étant le point d'entrée dans le moteur de recherche offrant par ailleurs un excellent référencement naturel. Le WebShop, le Wiki et le Blog étant liés ensembles, l’un permet inévitablement de découvrir les autres. Ainsi, la documentation entretenue et agrandie pendant des années a été l’élément fondamental assurant le fonctionnement de l’entreprise.
La nécessité d’un stock
Grâce à Amazon et consort, les clients ont pris l’habitude d’être livrés du jour au lendemain. Il est donc hors de question d’accepter des commandes tout en retardant la livraison d'une semaine à 15 jours (le temps de l'approvisionnement).
Même dans un domaine plus spécialisé comme l’électronique DIY, le client passe sont chemin si le produit n’est pas en stock et livrable immédiatement.
Le stock est donc devenu un élément stratégique et il s’agrandit avec l’ajout hebdomadaire de nouvelles références au catalogue.
2023 - 2024 – Maturité de l’intelligence artificielle
En fin 2023 et début 2024, le WebShop était très sollicité, trop sollicité. Au milieu des attaques quasi incessantes, nous retrouvions aussi des robots indexeurs qui travaillent de manière brutales sans considération pour le système hôte (faire sauter un moteur DB qui dispose de 64 Go de RAM, c'est pas se comporter avec bien bienveillance !).
Notre modèle économique est sur le point de basculer mais nous ne le savions pas encore.
C’est que le monde du Net est devenu une véritable jungle et la chute importante des ventes a d'abord été mise sur le compte des attaques DDoS que nous subissions en continu pendant des semaines... et qui rendaient le WebShop plus difficilement accessible.
2025 –la fin du "business model"
Les ventes ont continué de dégringoler, pour en revenir au niveau des premières années. Mais avec des frais et des contraintes de fonctionnement ayant fortement augmenté du fait de l'agrandissement de l'équipe, du stock...
Les moteurs de recherches offrent maintenant une réponse personnalisée grâce à l’IA.
Nos pages de documentation sont maintenant inutile puisqu’elles ne sont plus proposées en bon classement pour les différentes recherches. C'est que notre documentation, maintenant moins pertinente, est reléguée après la réponse personnalisée et les liens sponsorisés.
L'ironie que l'IA s'est entraînée sur nos pages (et nombreuses autres du même acabit) en créant au passage des surcharges et désagréments importants sur nos serveurs pendant des mois.
Encore mieux, la tranche la plus jeune de notre population, friands de nouvelles technologies, demande aux LLMs de concevoir leur projet. C’est qu'il est aujourd'hui possible de demander à une IA de créer un projet avec sélection du matériel, câblage, code (erreurs comprises). Je dois l'admettre, le résultat est de grande qualité... c'est bluffant.
Notre "business model" tel que nous le connaissions est donc devenu caduque. Il est toujours possible d’utiliser l’IA pour créer rapidement du contenu, l’adapter/le corriger et le republier mais quel intérêt pour nous? Surtout que la marque de fabrique de MCHobby a toujours été de fournir un contenu d'une valeur ajoutée importante. Publier des contenus auto-générés serait donc un crève-coeur en plus d'une imposture vis-à-vis de nos lecteurs.
L'autre option, pour maintenir le shop, serait de se battre contre quelques concurrents à coup de pub et de prix cassés (déjà qu'il est difficile de survivre dans le monde de l'électronique), ce n'est pas forcement ce à quoi nous nous destinions dans MC Hobby...
Conséquences
La chute des ventes implique une chute tout aussi dramatique des revenus. Sur de nombreux mois, cela a fini par avoir des conséquences sur l’emploi et il a fallu licencier et nous séparer de 2 excellents collaborateurs. Aujourd'hui, c'est la survie même de l’entreprise qui est en jeu.
Même si largement responsable du basculement de notre Business Model, l’IA n’est pas le seul responsable. Il faudra aussi parler de pratiques anticoncurrentielles mais cela sera pour un prochain article.
Ce stock qui était précédemment essentiel à notre survie (pour livrer rapidement les clients) est aujourd’hui disproportionné par rapport à la demande. Les fournisseurs exigent des commandes de plus en plus importantes et un engagement sur des volumes qui ne sont plus réalistes par rapport aux demandes. Sa valeur marchande ne justifie plus non plus son existence puisque son public ne sait même plus qu'il existe.
Conclusion
Le monde et les technologies évoluent rapidement et rien n'est jamais
vraiment acquis. Dans le monde du commerce, tout peut toujours basculer d'un
jour à l'autre.
Je pense que 10 ans de développements dans notre domaine d’activité, c’était déjà une belle chance en soi. Une niche --ce qu’était notre "Business Model"-- ne reste jamais longtemps une vraie niche.
 1. L’IA rend les apps intelligentes plutôt que fonctionnelles
1. L’IA rend les apps intelligentes plutôt que fonctionnelles Exemple concret : au lieu d’un simple tracker de fitness, une app IA peut prédire les blessures, adapter les plans d’entraînement à vos données réelles et vous coacher comme un pro.
Exemple concret : au lieu d’un simple tracker de fitness, une app IA peut prédire les blessures, adapter les plans d’entraînement à vos données réelles et vous coacher comme un pro. 2. Automatisation et personnalisation à grande échelle
2. Automatisation et personnalisation à grande échelle 3. Des interfaces plus naturelles : conversation, voix, gestes
3. Des interfaces plus naturelles : conversation, voix, gestes tu demandes à l’app
tu demandes à l’app 4. Moins d’apps, plus d’écosystèmes intelligents
4. Moins d’apps, plus d’écosystèmes intelligents 5. APIs IA = unifier et démultiplier les fonctionnalités
5. APIs IA = unifier et démultiplier les fonctionnalités 6. Impacts radicaux pour les développeurs et les entreprises
6. Impacts radicaux pour les développeurs et les entreprises les apps non-IA deviendront des commodités
les apps non-IA deviendront des commodités les apps IA-optimisées deviendront indispensables
les apps IA-optimisées deviendront indispensables l’avantage compétitif se gagne dans les données, les modèles et les expériences
l’avantage compétitif se gagne dans les données, les modèles et les expériences Conclusion : l’IA ne change pas juste une fonctionnalité — elle change la nature même de l’app mobile
Conclusion : l’IA ne change pas juste une fonctionnalité — elle change la nature même de l’app mobile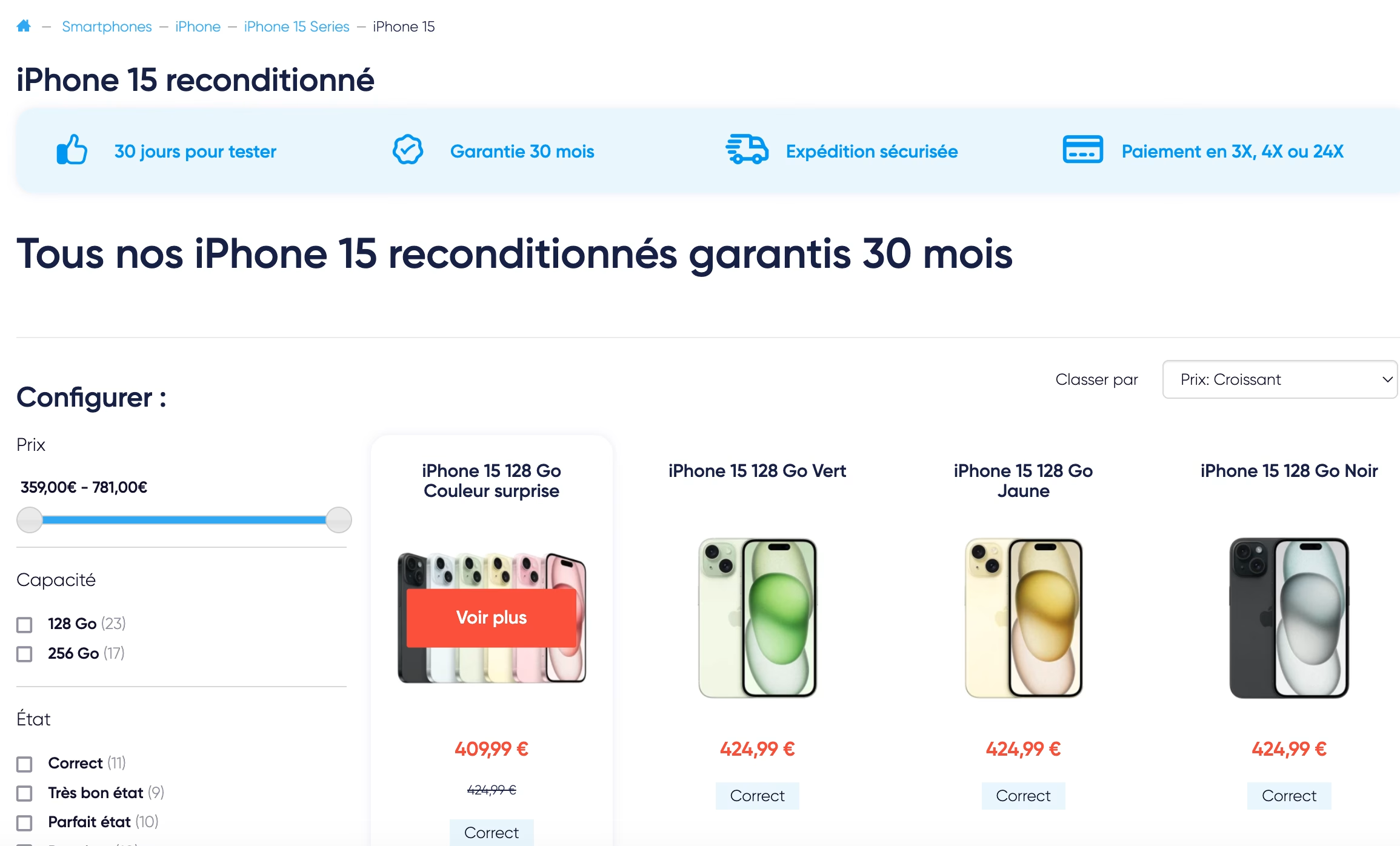


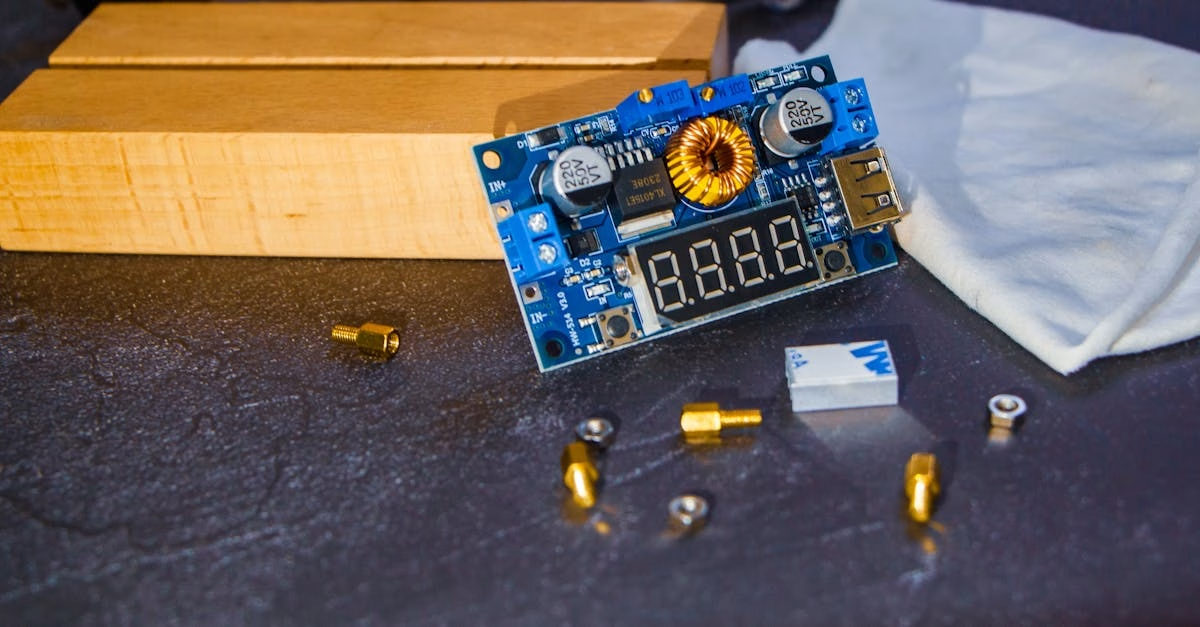















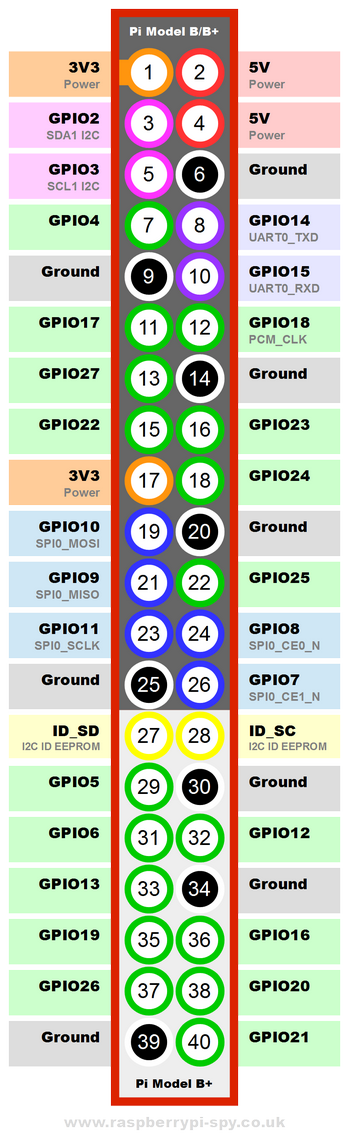{kind=link}