Le Pi Day... le 14 mars ou "march 14"...3.14 à l'anglaise
14 mars 2026 à 03:14
Bonjour,
Juste pour le plaisir de fêter ce jour si particulier.
 |
| Source: ZX Calc |
![]()
Bonjour,
Juste pour le plaisir de fêter ce jour si particulier.
|
| Source: ZX Calc |
![]()
Le RP2350 n’a jamais été pensé pour jouer dans la cour des monstres de fréquence. C’est un microcontrôleur : frugal, réactif, taillé pour des tâches temps réel et des projets embarqués. Officiellement, Raspberry Pi annonce des cœurs Arm Cortex-M33 ou Hazard3 RISC-V à 150 MHz. Sauf qu’en coulisses, certains ont décidé de pousser la logique à l’extrême […]
L’article RP2350 : Le microcontrôleur de Raspberry Pi poussé à 873 MHz ! est apparu en premier sur BlogNT : le Blog des Nouvelles Technologies.
Sur Framboise314, j’ai déjà eu l’occasion de vous parler de Recalbox à plusieurs reprises, et vous pouvez retrouver ces articles via cette recherche : Recalbox sur Framboise314. Avec la sortie de Recalbox 10, le projet franchit clairement un nouveau cap. Il ne s’agit pas d’une simple mise à jour cosmétique, mais d’une évolution importante de […]
Cet article Recalbox 10 : une évolution majeure du retrogaming sur Raspberry Pi, PC, Steam Deck… et même sur CRT ou borne JAMMA a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
SunFounder m’a envoyé cette carte PiPower 5 pour la tester sur le Raspberry Pi. Il s’agit d’une UPS (Uninterruptible Power Supply), c’est-à-dire d’une alimentation secourue : en cas de coupure du secteur, la batterie prend le relais pour éviter un arrêt brutal du système. La PiPower 5 sert donc à protéger la carte, la carte […]
Cet article SunFounder PiPower 5 HAT+ : test complet de l’UPS pour Raspberry Pi 5 a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Le samedi 21 mars 2026, je serai au LAB’Aux à Semur-en-Auxois dans le cadre de Libre en Fête pour un après-midi consacré au Raspberry Pi, aux usages concrets et aux échanges autour du libre.À 16 h, j’animerai une courte conférence pour présenter les différents modèles de la famille Raspberry Pi. Et il y aura même […]
Cet article Libre en Fête à Semur-en-Auxois : Raspberry Pi le 21 mars a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
ONE-PIX, c’est un kit open source de caméra hyperspectrale “single-pixel” où le Raspberry Pi joue le rôle de chef d’orchestre : il pilote la projection de motifs et synchronise les mesures du spectromètre pour reconstruire un “hypercube” d’images. Dans ce dossier (ancré dès l’intro au Creusot / ImVIA), on va décortiquer le principe, l’architecture et […]
Cet article ONE-PIX : le Raspberry Pi au cœur d’une caméra hyperspectrale open source (makers + recherche, ImVIA) a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Regarder un film dans des conditions parfaites en 2026, ça passe forcément par un écran des années 2000 ! Bah quoi ? Vous vous dites qu'est ce qu'il a encore fumé le gars ? Mais ouais, vous avez bien lu parce que pendant que tout le monde court après les dalles OLED 4K à 120 Hz à se toucher la nouille, y'a une petite communauté de passionnés qui redécouvre les bons vieux moniteurs CRT de PC pour mater des films en vrai 24p... et le résultat est vraiment chouette !
Car le problème avec la plupart des écrans, c'est qu'ils tournent à 60 Hz (ou sont configurés en 60 Hz par défaut). Et 24 images par seconde, ça rentre pas pile poil dans 60 (coucou les matheux !). Du coup, votre TV fait du "3:2 pulldown", c'est-à-dire qu'elle affiche certaines images 3 fois et d'autres 2 fois pour combler le trou. Et cela provoque une micro-saccade que vous voyez dans les travellings et qui est vite agaçante...
Bonne nouvelle, c'est pas le film qui est merdique, c'est votre écran qui galère sa mère. Et y'a pas grand-chose à faire côté logiciel pour compenser... ou plutôt, pas sur un écran 60 Hz classique.
Un moniteur CRT de PC, lui, s'en fiche complètement. Il peut se synchroniser sur n'importe quel taux de rafraichissement. Et c'est là que l'astuce de Bob (de RetroRGB) entre en jeu. Avec un simple Raspberry Pi 4, un convertisseur ACTIF HDMI vers VGA (genre un Lindy 38191 à une vingtaine d'euros) et LibreELEC avec Kodi, vous pouvez balancer du 23,976 Hz natif sur votre vieux tube cathodique. Et là, vous passez en mode cinéma pur, sans aucune interpolation !
En gros, plutôt que d'envoyer du 24p brut (certains CRT apprécient moyen les fréquences aussi basses), l'astuce c'est de multiplier par 3 : 23,98 x 3 = 71,94 Hz. Chaque image est ainsi affichée exactement 3 fois, à intervalles parfaitement réguliers comme ça, pas de saccade... Mais attention, ça ne fonctionne pas avec les TV CRT (car elles gèrent le multisync différemment). Et, ça marche aussi en x4 (95,92 Hz) si votre moniteur préfère ça.
Tout est expliqué dans cette vidéo :
Par contre, sachez le, le VGA ne transporte pas le son, du coup faudra brancher la sortie jack 3,5mm du Pi à des enceintes séparées.
Ensuite, côté résolutions, ça va du 640x480 au 1440x1080, tout en 4:3 bien sûr. Et pour pas avoir à bidouiller en SSH, Bob a créé un plugin EDID custom pour LibreELEC qui fait tout le boulot.
Vous sélectionnez votre résolution dans l'interface de Kodi et c'est réglé. C'est le plugin qui gère les timings EDID automatiquement, du coup Kodi détecte les modes disponibles tout seul.
D'ailleurs, si vous êtes plutôt Blu-ray physique, le RetroTINK 4K (environ 400 dollars le bouzin) peut aussi downscaler vers un CRT, mais il faudra ajouter un convertisseur HDMI-VGA en sortie vu qu'il ne sort qu'en HDMI. Du coup ça commence à faire pas mal de matos... et ça coûte un bras comparé à un Pi 4 qui traîne dans un de vos tiroirs !
Si le rétro-gaming sur CRT vous tente aussi, Vincent vous avait parlé de Recalbox 10 qui gère la sortie CRT sur Raspberry Pi 5 . Et côté interpolation de frames, y'a aussi l'algorithme RIFE qui fait le chemin inverse en générant des images intermédiaires pour passer de 24 à 60 fps (mais avec des artefacts, forcément).
Bref, voilà de quoi redonner vie à ces bons vieux tubes cathodiques. Perso, je trouve ça délire qu'un écran à 20 balles en récup' fasse du cinéma mieux qu'une dalle à +2000 euros.
Merci à Lorenper pour le partage !
![]()
Symbole de la débrouillardise numérique, longtemps cantonné aux bancs d’écoles et aux passionnés de bidouille informatique, Raspberry Pi vit aujourd’hui un destin boursier que peu auraient imaginé. Son titre a failli doubler entre le 16 et le 18 février, avant de retomber pour clôturer en baisse d à 4,10 livres, soit une valorisation d’un peu plus de 800 millions de livres.
L’étincelle porte un nom : OpenClaw, présenté comme le premier « agent IA personnel » capable de fonctionner localement sur un ordinateur, sans recourir au cloud. Son créateur, Peter Steinberger, vient d’être recruté par OpenAI le week-end dernier, ce qui a encore amplifié l’engouement autour du projet.
Or Raspberry Pi offre une porte d’entrée à prix cassé vers cet outil. Là où un Mac Mini coûte au minimum 600 $ aux États-Unis, un Raspberry Pi s’acquiert pour une centaine de dollars. Damindu Jayaweera, analyste chez Peel Hunt, résume l’équation dans une note à ses clients : le dispositif permet une fonctionnalité « suffisamment bonne à un coût marginal quasi nul », avec l’avantage décisif de « posséder la capacité de calcul plutôt que de la louer dans le cloud ».
Créé en 2012 par la fondation éponyme, le micro-ordinateur Raspberry Pi visait d’abord un objectif pédagogique : enseigner la programmation à bas coût. Proposé à moins de 50 €, il a conquis le monde de l’électronique embarquée, des makers et des chercheurs en robotique.
Mais avec l’explosion des projets d’intelligence artificielle générative, cet outil modeste est devenu une plateforme de prototypage bon marché, utilisée dans des milliers de projets mêlant vision par ordinateur, edge computing et automatisation locale.
Lorsque Raspberry Pi Ltd a fait son entrée à la bourse de Londres en 2024, peu observateurs imaginaient qu’un simple fabricant de cartes Linux à faible consommation attirerait les foules. Pourtant, en quelques mois, le titre a gagné plus de 200 %, avant de connaître des phases de correction spectaculaires.
Sur les forums d’investisseurs, la marque est devenue un véritable « mème stock », comme GameStop ou AMC à l’époque de la pandémie. Les hashtags #PiAI et #TinyAI circulent sur X, Reddit et Discord, relayant des montages reliant Raspberry Pi à l’essor de l’IA embarquée. Les rumeurs vont bon train ; d’un partenariat hypothétique avec Nvidia à une intégration dans des systèmes robotiques « low cost ».
Cette frénésie illustre la façon dont la bulle IA engloutit tout l’écosystème technologique, jusqu’à ses acteurs les plus modestes. Les investisseurs cherchent fébrilement les « prochains Nvidia », quitte à surinterpréter le moindre lien avec l’intelligence artificielle.
Si la valorisation s’envole, le fabricant reste fidèle à sa philosophie d’origine : produire du matériel ouvert, abordable et responsable. Son PDG, Eben Upton, a récemment rappelé que « Raspberry Pi ne construira pas de GPU d’IA, mais continuera à rendre la technologie accessible à ceux qui innovent à petite échelle ».
The post Raspberry Pi rattrapé par la fièvre de l’IA appeared first on Silicon.fr.
![]()
Recalbox vient de publier la version 10 de sa distribution open-source française dédiée au rétrogaming. Au programme, le support du Raspberry Pi 5 et du Pi 500, l'arrivée sur Steam Deck en version LCD et OLED, de nouvelles émulations dont la Xbox originale et la GameCube, une interface entièrement revue, et du matériel dédié pour les fans de CRT et de bornes d'arcade. Que du bon.
![]()
Du Raspberry Pi 5 au Steam Deck
La version 10 de Recalbox élargit donc son catalogue de matériel compatible, et pas qu'un peu. Le Raspberry Pi 5 est désormais pris en charge, y compris dans sa version 2 Go de RAM, tout comme le Raspberry Pi 500. Mais surtout, la distribution débarque sur les consoles portables PC. Le Steam Deck, en version LCD comme OLED, profite d'une intégration qui gère la luminosité et le mode veille directement depuis l'interface. La très bonne Asus ROG Ally et le Lenovo Legion Go débarquent aussi, même si le support reste expérimental pour le moment. On passe quand même d'un projet pensé pour Raspberry Pi à une distribution qui tourne sur une tonne de machines différentes.
![]()
Une interface repensée
Côté émulation, la version 10 ajoute la Xbox originale exclusivement sur PC et Steam Deck (sous réserve de puissance suffisante). Sur Raspberry Pi 5, ce sont la GameCube, la Wii, la Nintendo DS et le Sega Model 3 qui font leur entrée. Si ces systèmes tournent de manière fluide dans la majorité des cas (environ 80 %), on atteint ici les limites matérielles du Pi 5 : certains titres très gourmands pourront donc montrer quelques signes de ralentissement.
Du matériel pour les fans de rétro
Pour ceux qui veulent aller plus loin que le logiciel, Recalbox continue de proposer du matériel dédié de qualité. Le RGB DUAL 2 et le RGB JAMMA 2 permettent de brancher des écrans CRT et des bornes d'arcade avec une gestion dynamique des résolutions. Le projet pousse le concept encore plus loin avec le Recalbox Card Reader et ses RecalCards, des cartouches physiques qui lancent un jeu quand on les insère, à l'ancienne. Et si vous cherchez du clé en main, la boutique propose des kits RecalTower préinstallés avec Raspberry Pi 5, et ça on aime.
J'ai toujours un Raspberry Pi avec Recalbox chez moi, et tout ceci me donne bien sûr très envie de tout mettre à jour !
Article invité publié par
Vincent Lautier
.
Vous pouvez aussi me lire sur
mon blog
, sur
Mac4ever
, ou lire tous les tests que je publie ici, comme cette
Webcam 4K
, ou ce
dock Thunderbolt 5
.
![]()
À l’occasion de ses 10 ans de Macé Robotics, l’entreprise organise un concours qui se déroulera jusqu'au 26 février 2026.
Macé Robotics est une entreprise individuelle fondée et gérée par moi-même (Nicolas), basée en Bretagne, spécialisée dans la conception et la réparation électronique, aussi bien pour les entreprises que pour les particuliers. Depuis 2016, je fabrique aussi du matériel Open Source également des robots mobiles Open Source destinés à l’enseignement supérieur et à la recherche. Ces robots sont basés sur un système Linux (Raspberry Pi OS), intégrant une carte Raspberry Pi ainsi qu’un microcontrôleur (Pico) dédié à la gestion des moteurs et des capteurs. J’utilise la suite logicielle KiCad sous licence GNU GPL (https://www.kicad.org/) pour la conception des circuits imprimés de ces robots.
Ces robots sont principalement utilisés dans les filières de génie informatique afin de faciliter l’apprentissage du système Linux, des réseaux informatiques et du langage Python à travers des projets concrets et ludiques.
Attribution des lots par tirage au sort :
→ 1er lot : une carte Raspberry Pi 5 (2 Go)
![]()
→ 2e lot : une carte Raspberry Pi Pico 2W
La livraison est offerte en France.
Retour sur la course de robots – Saint-Brock Robot Race d'une dépêche précédente
Suite à la dépêche de décembre 2024 concernant l’organisation de la course de robots mobiles, voici quelques retours sur cet événement : malgré plusieurs annulations d’écoles survenues quelques semaines avant la compétition, la course a tout de même pu avoir lieu.
Environ quinze participants ont pris part à la compétition. Parmi les robots engagés, on comptait un robot DIY piloté par un microcontrôleur ESP32, aux côtés de plusieurs robots basé sur Raspberry Pi, offrant ainsi une belle diversité technologique.
Commentaires : voir le flux Atom ouvrir dans le navigateur
Bonjour à tous,
Tout récemment, je voulais utiliser un module RFM69 sur un Compute Module 5 (autrement dit l'équivalent d'un Raspberry-Pi 5) faisant fonctionner un logiciel écrit Python.

L'image ci-dessous se présente le module RFM69HCW 433MHz . Ce module permet de transmettre des données sur un réseau numérique utilisant le ondes-radios comme medium de transfert. C'est un peu le protocole internet appliqué à la radio.
 |
| RFM69HCW 433MHz |
Comme le Pilote est développé sous le précepte "Plateform Agnostic Driver" de sorte à pouvoir fonctionner indépendamment de la plateforme MicroPython cible.
 |
| esp8266-upy - Plateform Agnostic Micrpython Driver |
 |
| Source: Raspberry-pi.ovh |
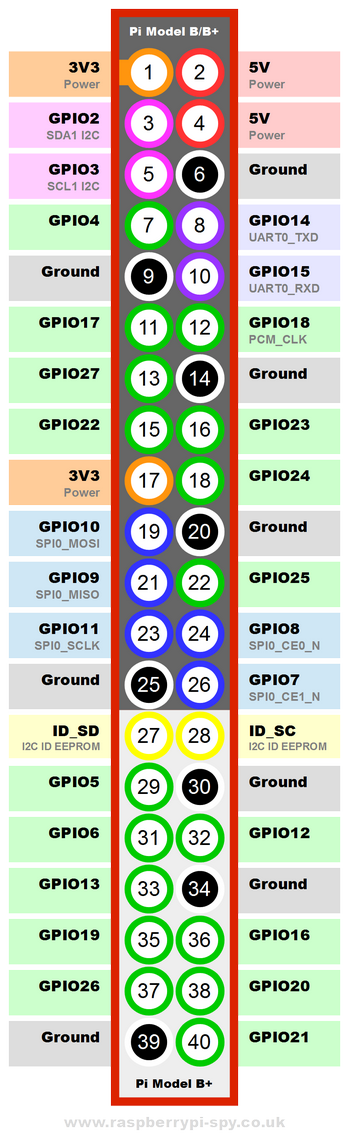
Les connexions suivantes sont établies entre le module RFM69 et le GPIO Raspberry-Pi.

La broche CS (chip select) est branchée sur le GPIO 25 alors qu'il existe les broches CE0 (GPIO8) et CE1 (GPIO7).
Le problème ici est que CE0 et CE1 sont automatiquement gérés par le système d'exploitation alors que sous MicroPython, c'est le code utilisateur qui gère l'état du signal CS.
Dans le cas présent, la gestion automatique de CE0 et CE1 empêche l'utilisation du burst_read sur le module RFM69 raison pour laquelle le GPIO25 est utilisé comme signal CS (ce signal étant contrôlé par le code utilisateur).
Commençons par récupérer la bibliothèque MicroPython du RFM69 depuis le dépôt esp8266-upy pour y ajouter l'encodage du fichier (important pour Python).
 |
| Ajout de l'encodage dans le bibliothèque RFM69 |
Couche de compatibilité Python --> MicroPython
Création des fichiers machine.py et micropython.py pour accueillir les classes Pin & SPI ainsi que la déclaration de la fonction const()

#!/usr/bin/python # -*- coding: utf-8 -*- """ hack_time.py : mimic the MicroPython alike specific methods """ import time def _sleep_us( us ): time.sleep( us*0.000001 ) def _sleep_ms( ms ): time.sleep( ms*0.001 ) def _ticks_ms(): return int(time.time()*1000) def _ticks_diff( v1, v2 ): return v1-v2 time.sleep_us = _sleep_us time.sleep_ms = _sleep_ms time.ticks_ms = _ticks_ms time.ticks_diff = _ticks_diff
Il ne reste plus qu'a adapter le script d'exemple pour créer l'instance du bus SPI (sur le RPi) et passer le tout à la bibliothèque MicroPython originale.
#!/usr/bin/python # -*- coding: utf-8 -*- from machine import SPI, Pin import hack_time from rfm69 import RFM69 # Machine.py for Raspberry-Pi 5 spi = SPI( 0 ) nss = Pin( 25, Pin.OUT, value=True ) # Do not use the RPI CE0/CE1, it is not compatible with the Burst_Read of RFM69 rst = Pin( 18, Pin.OUT, value=False ) rfm = RFM69( spi=spi, nss=nss, reset=rst ) rfm.frequency_mhz = 433.1 ....
Le bus SPI est rattaché au bus matériel SPI0 & CE0.
Une broche Enabled (nss) alternative est utilisé avec le GPIO25 pour contrôler les transactions du bus SPI. La broche CE0 du GPIO est donc ignorée.
Enfin, le GPIO 10 est utilisé pour réinitialisé le module RFM69.
Au final, la création de l'instance RFM69 et le restant du code (y compris la bibliothèque RFM69) est identique entre MicroPython et Python (sur RPi5).
L'exécution de l'exemple sur le Raspberry-Pi 5 produit le résultat attendu (identique lorsqu'il est exécuté sur un Pico).
 |
| test_config.py : exécution de la bibliothèque MicroPython RFM69 sur Raspberry-Pi 5 |
![]()
La fondation Raspberry Pi avait annoncé une hausse de prix en décembre dernier liée à la flambée du coût de la mémoire LPDDR4.
The post Le prix des Raspberry Pi augmente encore, ça devient hallucinant ! first appeared on Bhmag.La SunFounder Fusion HAT+ ressemble à un simple HAT pour Raspberry Pi… jusqu’au moment où vous réalisez que c’est plutôt un couteau suisse pour robot “assisté par IA”. Elle ne “fait” pas l’IA toute seule : les neurones restent sur le Raspberry Pi (un Pi 5 dans mon cas), mais la carte apporte le muscle […]
Cet article SunFounder Fusion HAT+ : alimentation 2×18650, moteurs et contrôle “IA-ready” pour Raspberry Pi a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Derrière Macé Robotics, Nicolas mêle réparation électronique au composant et conception de cartes pour des besoins professionnels, tout en développant des robots mobiles pour l’éducation et la recherche. On trouve notamment des projets de robots basés sur Raspberry Pi et Raspberry Pi Pico (MRPi1, MR-Pico), accompagnés de contenus et documentations. Dans ce contexte, il organise […]
Cet article Concours Mace Robotics : un Raspberry Pi 5 (et un Pico 2W) à gagner ! a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
La fondation Raspberry Pi, à qui l'on doit les cartes du même nom vient d'annoncer la sortie d'un nouveau produit : le Raspberry Pi Flash Drive.
The post Raspberry Pi Flash Drive : une clé usb en aluminium signée Raspberry Pi first appeared on Bhmag.Dans cette seconde partie, le Raspberry Pi 5 passe à l’action avec la vidéo temps réel accélérée par Hailo-10H. Détection de personnes, cadrage dynamique, pose squelette et reconnaissance des mains : on enchaîne les modèles concrets. L’objectif est d’évaluer les performances réelles, les limites, et les bons compromis en situation réelle. Ici, pas de cloud […]
Cet article Raspberry Pi AI HAT+ 2 : vision par ordinateur en vidéo avec Hailo-10H (Partie 2) a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Avec la Raspberry Pi AI HAT+ 2, Raspberry Pi propose une carte intégrant directement un accélérateur Hailo-10H et 8 Go de mémoire dédiée, conçue pour le Raspberry Pi 5. Cette carte permet d’exécuter localement des modèles d’IA générative, des LLM et des Vision-Language Models, sans recours au cloud. L’AI HAT+ 2 délivre jusqu’à 40 TOPS […]
Cet article Raspberry Pi AI HAT+ 2 : installer Hailo-10H et lancer un LLM local (Partie 1) a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Avec la carte Raspberry Pi AI HAT+ 2, la Fondation Raspberry Pi introduit une carte HAT+ intégrant l’accélérateur Hailo-10H et 8 Go de mémoire dédiée, conçue exclusivement pour le Raspberry Pi 5. Connectée en PCIe Gen 3, elle vise l’exécution locale de modèles d’IA sans dépendre du cloud. Dans ce premier article, je vous présente […]
Cet article Raspberry Pi AI HAT+ 2 : présentation matérielle et installation sur Raspberry Pi 5 a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Aujourd’hui, je vous propose de découvrir Pimmich, un cadre photo connecté open source basé sur Raspberry Pi, pensé pour afficher vos souvenirs sans cloud ni abonnement, en restant 100% local. Avec les récents changements côté Google Photos, beaucoup d’entre vous ont dû revoir leurs habitudes… et Aurélien a eu le bon réflexe : s’appuyer sur […]
Cet article Pimmich – Un cadre photo connecté open source basé sur Raspberry Pi a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
Installer un serveur perso chez soi, sur un Raspberry Pi 5 ou un Pi 500+, c’est à la portée de tout maker… à condition de suivre la bonne méthode. Dans cet article, on va poser YunoHost sur un SSD NVMe, faire la post-installation, installer une première appli (WordPress), puis rendre le serveur accessible depuis l’extérieur […]
Cet article Raspberry Pi 5 + SSD : installer YunoHost, HTTPS Let’s Encrypt et WordPress (pas à pas) a été publié en premier sur Framboise 314, le Raspberry Pi à la sauce française..... - Framboise 314, le Raspberry Pi à la sauce française.... - La référence du Raspberry Pi en France - Par l'auteur du livre "Raspberry Pi 4" paru aux Edts. ENI
{kind=link}