Razberry : transformez votre Raspberry Pi en serveur domotique Z-Wave
Il n’y a plus aucun doute, avec 2014 nous entrons dans l’ère de la domotique et des technologies du « tout connecté » ! Je m’en réjouis car j’attendais cela avec impatience ![]()
Dans cet article, nous allons voir comment le Raspberry Pi peut vous permettre de domotiser votre maison à moindre frais en s’appuyant sur le protocole z-wave ![]()
Domotique
Derrière le mot « domotique » se cache de nombreuses technologies et des usages très variés. Il est question par exemple de commander l’allumage de ses lumières, contrôler son chauffage, programmer l’ouverture de ses volets,… On parle également de la mesure de la consommation des équipements électriques, de la température des pièces, de détecter les incendies, de collecter toutes les données qui permettent à une maison ou un bâtiment de fonctionner… Mais la domotique c’est également la sécurité des personnes, la télésurveillance, les caméras connectées, les alarmes, les capteurs de présence, la détection d’intrusion, etc…
Bref, la domotique c’est tout ce qui touche de près ou de loin à l’informatique, aux automatismes, aux télécommunications, à l’électronique et qui s’applique à l’habitat ![]()
Toutes ces technologies existent déjà depuis longtemps, mais à mon sens, la notion de domotique prend son sens quand toutes ces choses peuvent être pilotées de manière centralisée, et surtout, à distance à travers Internet ![]() En effet, je dispose déjà depuis quelques années de prises murales télécommandées, achetées dans une grande surface de bricolage, pour allumer et éteindre les lumières dans mon séjour ; c’est très pratique. En revanche, connecter ce système à un réseau informatique, et donc pouvoir le contrôler à distance et réaliser une infinité de programmes et de scénarios, augmente considérablement le potentiel de la chose
En effet, je dispose déjà depuis quelques années de prises murales télécommandées, achetées dans une grande surface de bricolage, pour allumer et éteindre les lumières dans mon séjour ; c’est très pratique. En revanche, connecter ce système à un réseau informatique, et donc pouvoir le contrôler à distance et réaliser une infinité de programmes et de scénarios, augmente considérablement le potentiel de la chose ![]()
C’est pourquoi, à mon avis, en se rapprochant de nos ordinateurs, tablettes et autres périphériques mobiles, la domotique devient réellement pertinente ![]()
Z-Wave
![]() Parmi les nombreux systèmes, marques et protocoles domotique existants, il y en a un qui se démarque et gagne en popularité. Il s’agit du protocole Z-Wave.
Parmi les nombreux systèmes, marques et protocoles domotique existants, il y en a un qui se démarque et gagne en popularité. Il s’agit du protocole Z-Wave.
Ce protocole ouvert, communiquant par onde radio, fonctionne sur le principe du « maillage » (topologie mesh), c’est à dire que chaque « module » (prise de courant, capteur de température, détecteur de présence,…) retransmet les signaux afin de garantir une grande couverture. Le gros avantage de ce protocle est qu’il est « ouvert ». Par conséquent, il existe de nombreuses entreprises et marques qui proposent des produits compatibles entre eux ![]()
Le site de la Z-Wave Alliance rassemble tous les constructeurs et acteurs (plus de 250 à l’heure actuelle) qui travaillent autour du Z-Wave et référence aujourd’hui plus de 1000 produits Z-Wave ![]() Il y a de quoi faire !
Il y a de quoi faire !
Je préfère de loin ce type de protocole ouvert par rapport aux systèmes de grandes marques qui proposent leur écosystème chèr et fermé ! Surtout lorsqu’il s’agit de ma maison ! Selon, moi, un système domotique complet doit être ouvert et permettre à l’utilisateur de le maitriser comme il l’entend.
Razberry
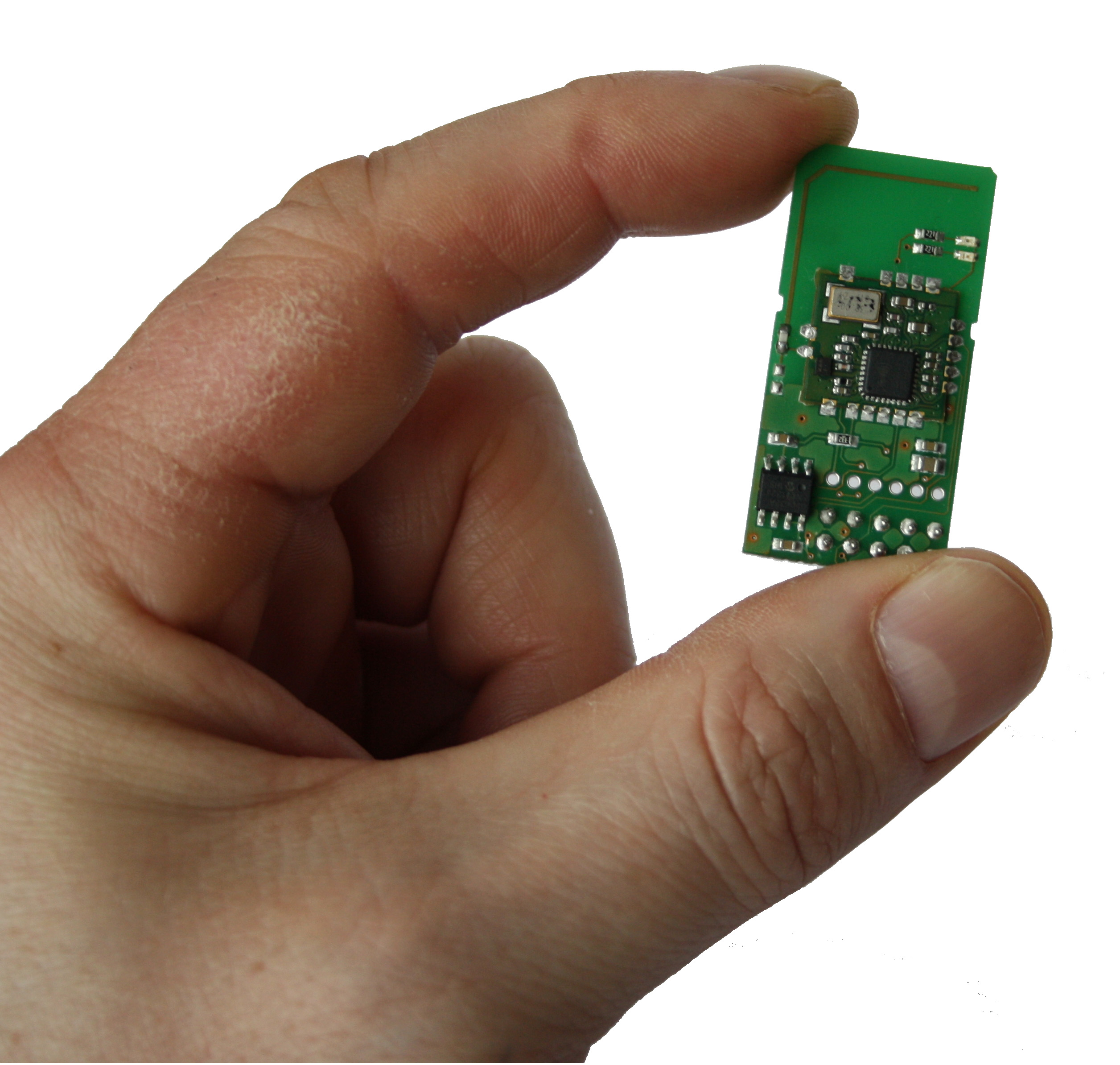 Depuis quelques mois la société Z-Wave.me propose une carte d’extension pour nos chers petits Raspberry Pi : Razberry
Depuis quelques mois la société Z-Wave.me propose une carte d’extension pour nos chers petits Raspberry Pi : Razberry
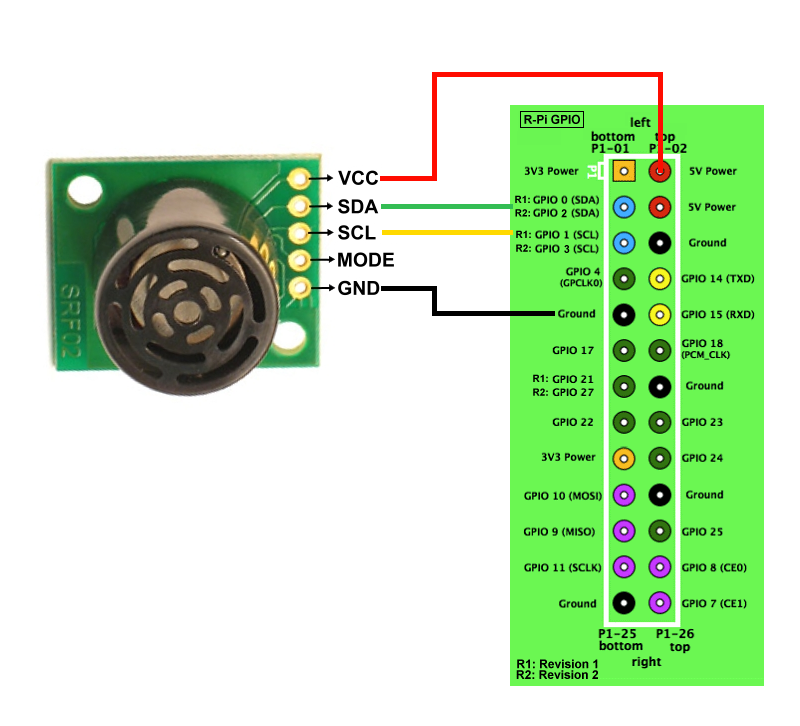
Il s’agit d’un petit circuit qui se branche directement sur le port GPIO permettant ainsi au Pi de parler le Z-Wave ![]()
Ce module est livré avec le logiciel Z-Way (encore en développement) facilement installable sur Raspbian en suivant la procédure décrite sur le site z-wave.me – Documentation. Plusieurs interfaces web sont disponibles (desktop, mobile,…) pour créer votre réseau et gérer vos modules Z-Wave.
La carte d’extension Razberry se négocie autour de 59€, vous pouvez l’obtenir sur Amazon notamment.
Très petite, elle se loge sans problème dans un boitier Raspberry Pi.


Je vous propose de lire l’article très complet du site maison-et-domotique.com sur la carte Razberry : http://maison-et-domotique.com/product/raspberry-et-razberry-la-box-domotique-ideale
Une API pour les gouverner tous
Le point fort de la partie logicielle livrée avec la Razberry est son API web ![]() Cette interface de programmation vous permet de créer vos propres programmes, dans le language que vous voulez
Cette interface de programmation vous permet de créer vos propres programmes, dans le language que vous voulez ![]() De manière très synthétique, vous pouvez gérer et piloter vos modules Z-Wave en lançant des requêtes HTTP GET sur votre Raspberry Pi ! C’est vraiment très simple et très souple.
De manière très synthétique, vous pouvez gérer et piloter vos modules Z-Wave en lançant des requêtes HTTP GET sur votre Raspberry Pi ! C’est vraiment très simple et très souple.
Je vous propose de lire ce tuto très complet : http://www.openremote.org/display/docs/OpenRemote+2.0+How+To+-+Z-Wave+with+Razberry
Dans mon prochain article (qui est déjà en préparation) je vous présenterai mon installation Z-Wave composé de cinq modules « prise de courant » pilotés depuis mon smartphone ![]() Vous verrez, c’est très simple à mettre en place en quelques lignes de PHP, HTML et JavaScript
Vous verrez, c’est très simple à mettre en place en quelques lignes de PHP, HTML et JavaScript ![]()
Domotique, Internet et sécurité
Si vous vous lancez dans la domotique, il est très important de comprendre les enjeux de sécurité. En effet, si vous voulez « connecter » votre maison à Internet, il faut bien comprendre que votre maison devient, dans une certaine mesure, « pilotable » depuis n’importe où ! Il est donc primordial de vous assurer que votre système est sécurisé pour éviter que des personnes mals intensionnées prennent le contrôle de votre maison !
 Je vous propose de lire cette série de trois articles du blog de la société Advens (spécialisée dans la sécurité) qui aborde cette problématique de manière très professionnelle et concrète, autour d’un projet de pilotage d’une chaudière
Je vous propose de lire cette série de trois articles du blog de la société Advens (spécialisée dans la sécurité) qui aborde cette problématique de manière très professionnelle et concrète, autour d’un projet de pilotage d’une chaudière ![]()
- Le Raspberry PI et la chaudière… WTF ? (épisode 1)
- Le Raspberry PI et la chaudière… WTF ? (épisode 2)
- Le Raspberry PI et la chaudière… WTF ? (épisode 3)
L’article Razberry : transformez votre Raspberry Pi en serveur domotique Z-Wave est apparu en premier sur MagdiBlog.